Multi-Robot Coordination, Reinforcement Learning, and Games
We study scalable coordination for teams of robots operating under local communication,
coupled objectives, adversarial uncertainty, and graph-structured tasks. The work combines
distributed optimization, game theory, learning from demonstrations, and planning on graphs.
Bi-CL: A Reinforcement Learning Framework for Robots Coordination Through Bi-level Optimization
Zechen Hu, Daigo Shishika, Xuesu Xiao, and Xuan Wang. IEEE/RSJ IROS, 2024.
A reinforcement learning framework that connects coordination learning with bi-level optimization.
Paper
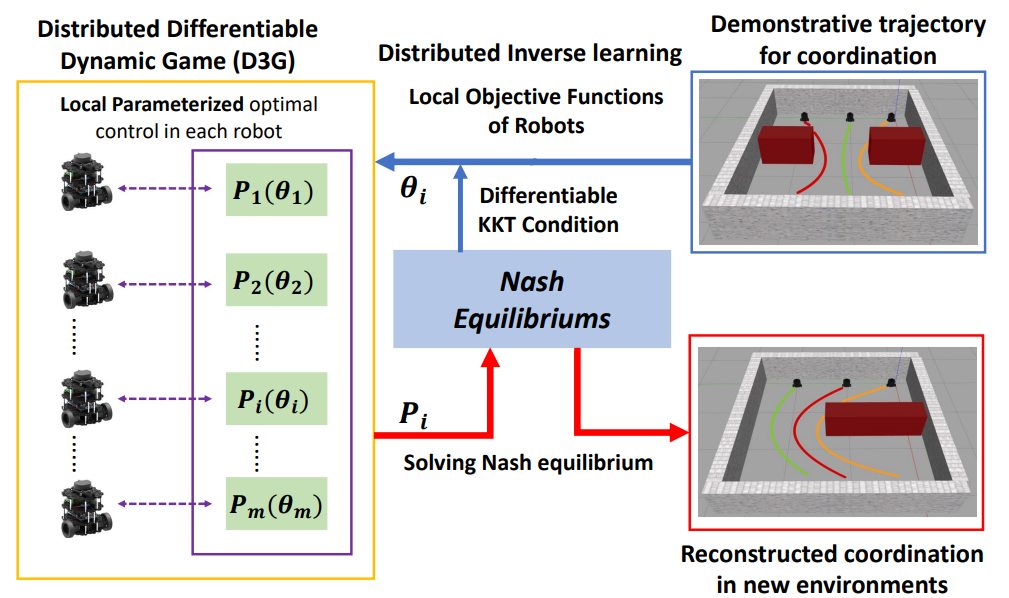
D3G: Learning Multi-Robot Coordination from Demonstrations
Yizhi Zhou, Wanxin Jin, and Xuan Wang. IEEE/RSJ IROS, 2024.
Distributed differentiable dynamic games for learning coordination
strategies from demonstrations.
Paper
Video
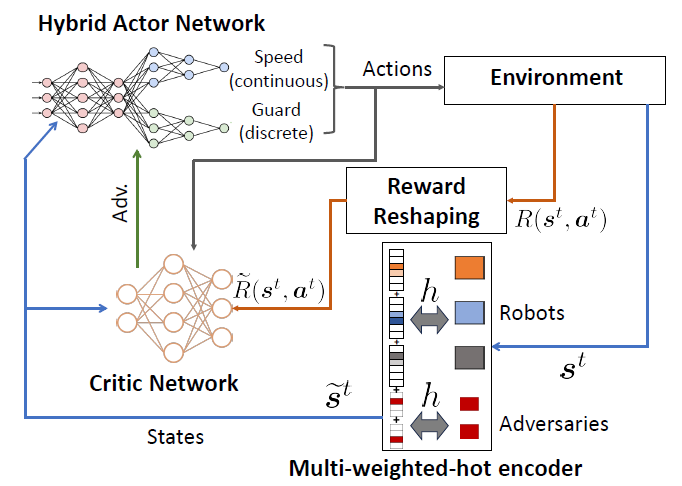
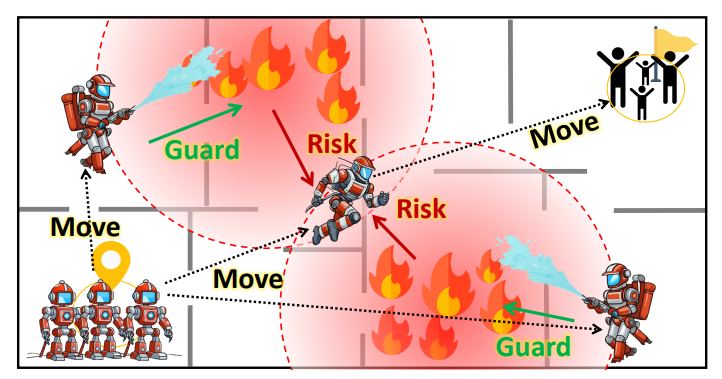
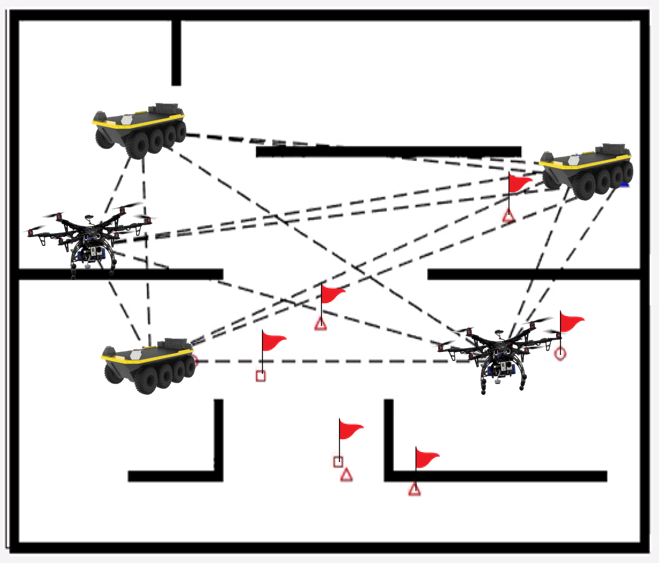
Learning Coordinated Maneuver in Adversarial Environments
Zechen Hu, Manshi Limbu, Daigo Shishika, Xuesu Xiao, and Xuan Wang. IEEE/RSJ IROS, 2024.
A reinforcement learning framework that enables robot coordination in adversarial environments.
Paper
Team Coordination on Graphs with State-Dependent Edge Costs
Manshi Limbu, Zechen Hu, Sara Oughourli, Xuan Wang, Xuesu Xiao, and Daigo Shishika. IEEE/RSJ IROS, 2023.
Best Paper Award on Cognitive Robotics finalist.
Paper
Video
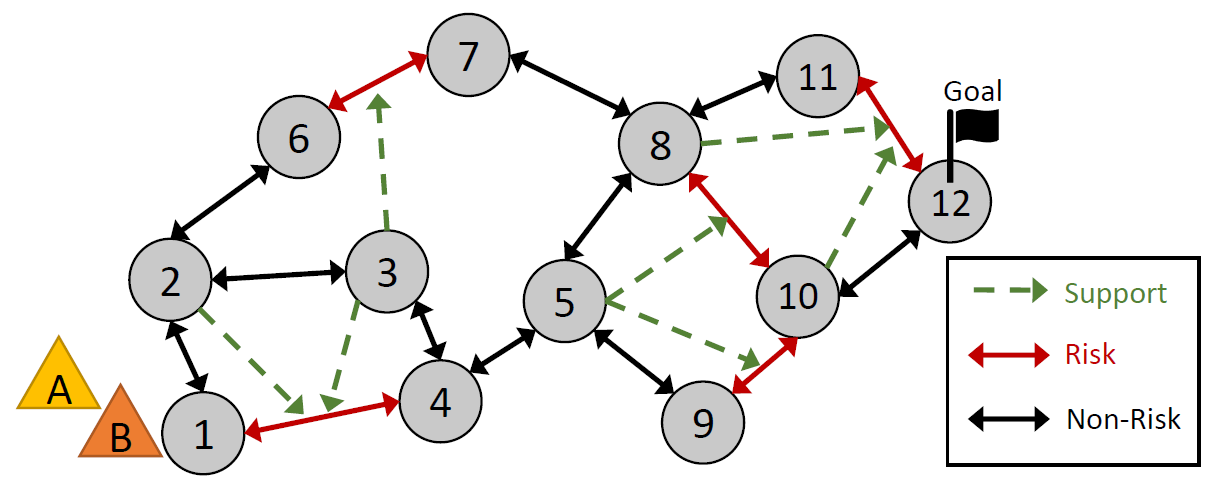
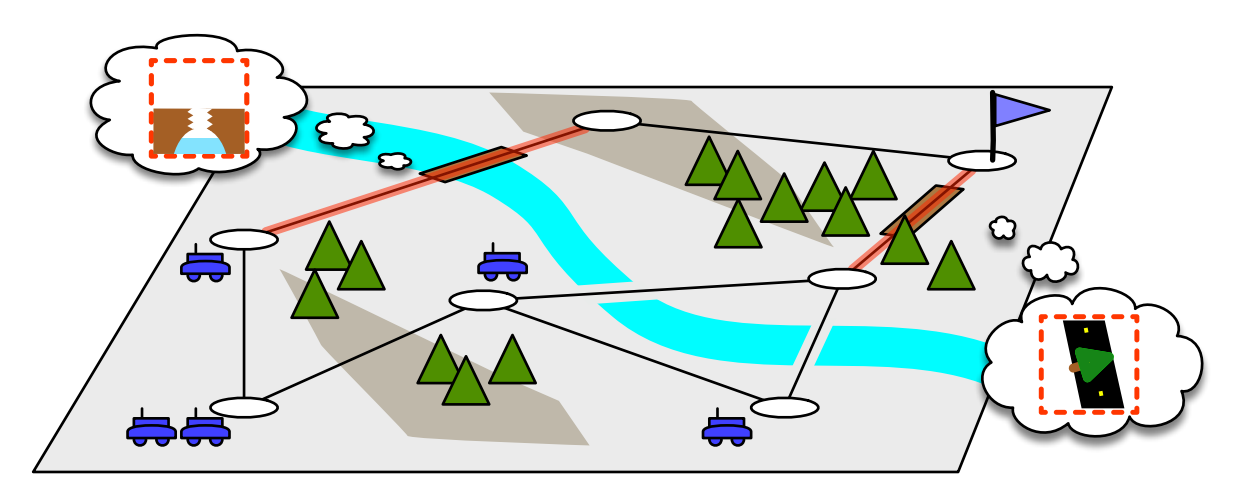
Team Coordination on Graphs: Problem, Analysis, and Algorithms
Yanlin Zhou, Manshi Limbu, Gregory J. Stein, Xuan Wang, Daigo Shishika, and Xuesu Xiao. IEEE/RSJ IROS, 2024.
Graph-based coordination analysis and algorithms for multi-robot teams.
Paper
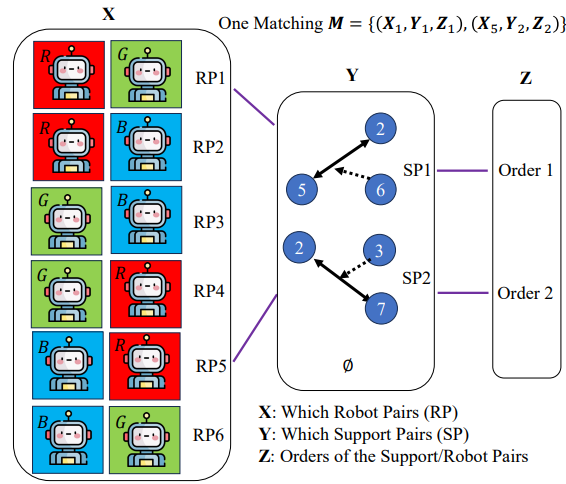
Multi-Robot Coordination in an Adversarial Graph-Traversal Game
James Berneburg, Xuan Wang, Xuesu Xiao, and Daigo Shishika. IEEE/RSJ IROS, 2025.
Coordination under adversarial graph traversal and strategic task constraints.
Paper
Robot Learning and Foundation Models
We explore learning-based autonomy for robots and multi-agent systems, including
reinforcement learning, context-aware adaptation, and emerging
foundation-model-inspired reasoning for robot decision making.

CARoL: Context-Aware Adaptation for Robot Learning
Zechen Hu, Tong Xu, Xuesu Xiao, and Xuan Wang. IEEE Robotics and Automation Letters, 2025.
Context-aware reinforcement learning for efficient adaptation across related robot tasks.
Paper
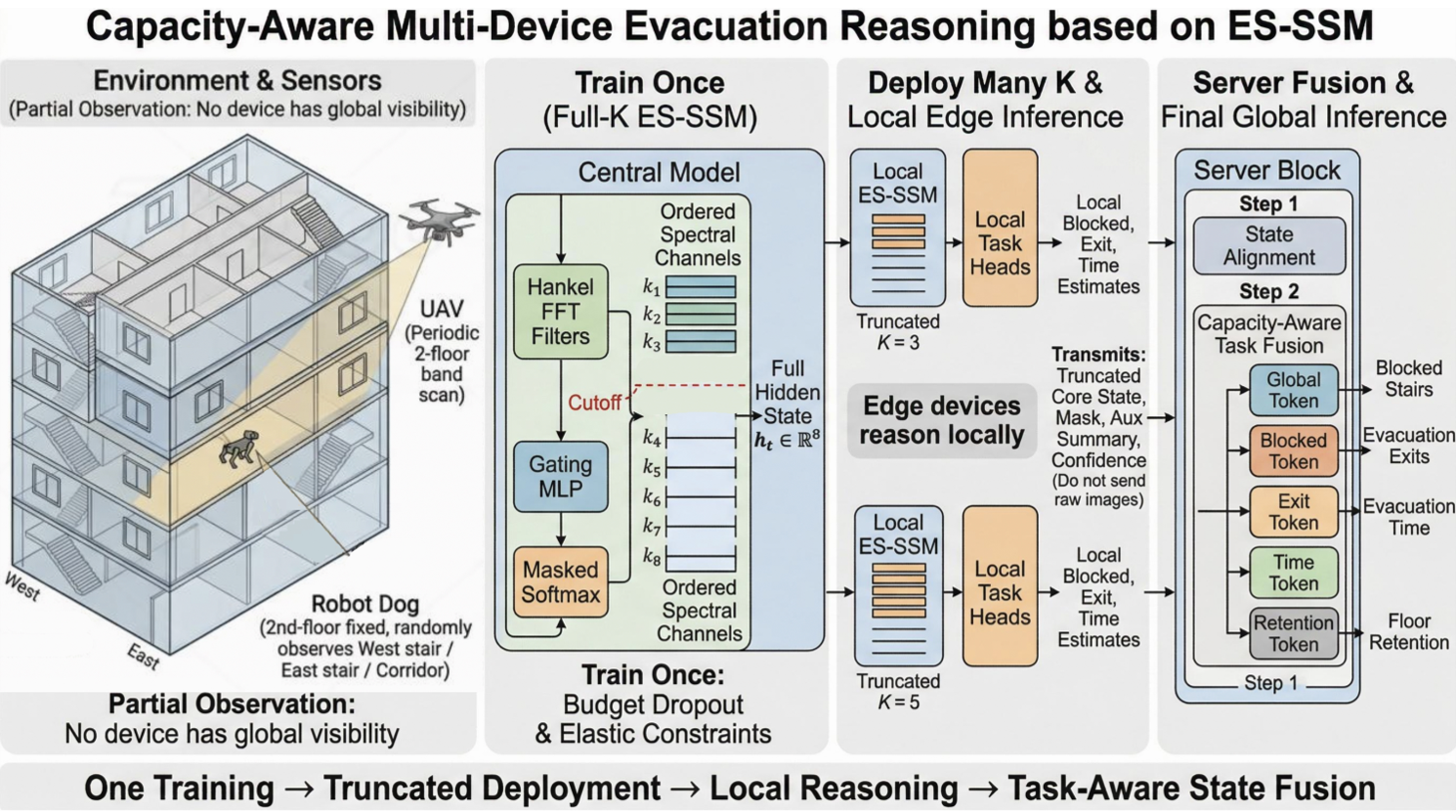
Elastic Spectral State Space Models for Budgeted Inference
Dachuan Song, and Xuan Wang. Arxiv.
Spectral State Space Models (ES-SSM) requires only one-time training at full capacity, but can be directly truncated into arbitrary scales
for budgeted, runtime inference without retraining, on heterogeneous devices.
Paper
GitHub
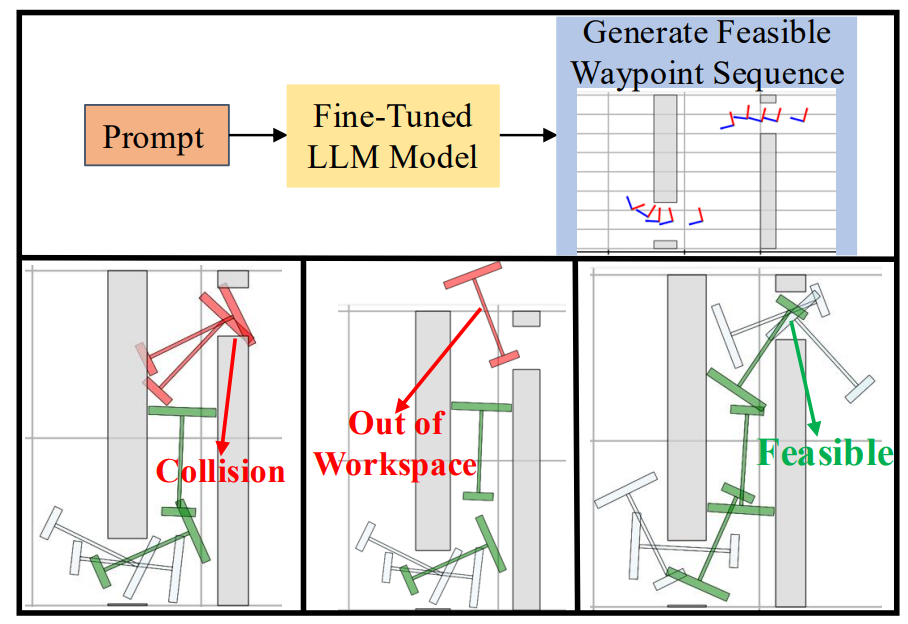
Geometry-Aligned LLM Fine-Tuning for Sequential Narrow-Opening Planning
Al Jaber Mahmud, and Xuan Wang. arXiv.
This paper proposes a geometry-aligned LLM fine-tuning framework for rigid-body motion planning through multiple sequential narrow openings.
The method generates fixed-length, machine-readable waypoint sequences that are geometrically feasible and coordinated across openings.
Paper
Human-Robot Interaction and Collaborative Autonomy
We develop control and planning methods for robots that coordinate with humans, adapt to
human uncertainty, and provide safety-aware assistance in collaborative manipulation and
transportation tasks.

Human-Robot Co-Transportation using Disturbance-Aware MPC with Pose Optimization
Al Jaber Mahmud, Amir Hossain Raj, Duc M. Nguyen, Weizi Li, Xuesu Xiao, and Xuan Wang. IEEE/RSJ IROS, 2025.
Whole-body control for human-robot co-transportation under disturbance and human uncertainty. Prelimiary work got Best Paper Finalist at the ICRA Workshop on Exploring Role Allocation in Human-Robot Co-Manipulation.
Paper
Supplement
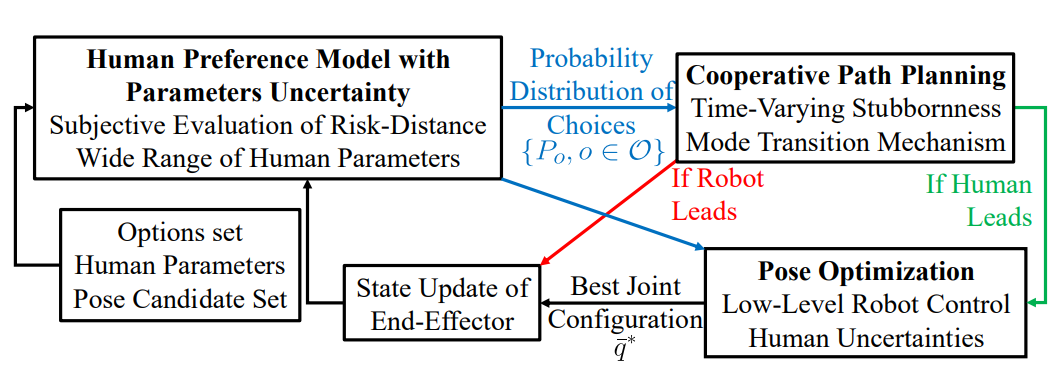
Mutual Adaptation in Human-Robot Co-Transportation with Human Preference Uncertainty
Al Jaber Mahmud, Weizi Li, and Xuan Wang. arXiv.
It models probabilistic human choices, introduces a time-varying stubbornness measure for coordination-mode transitions,
and uses pose optimization to improve task performance when adapting to human behavior.
Paper
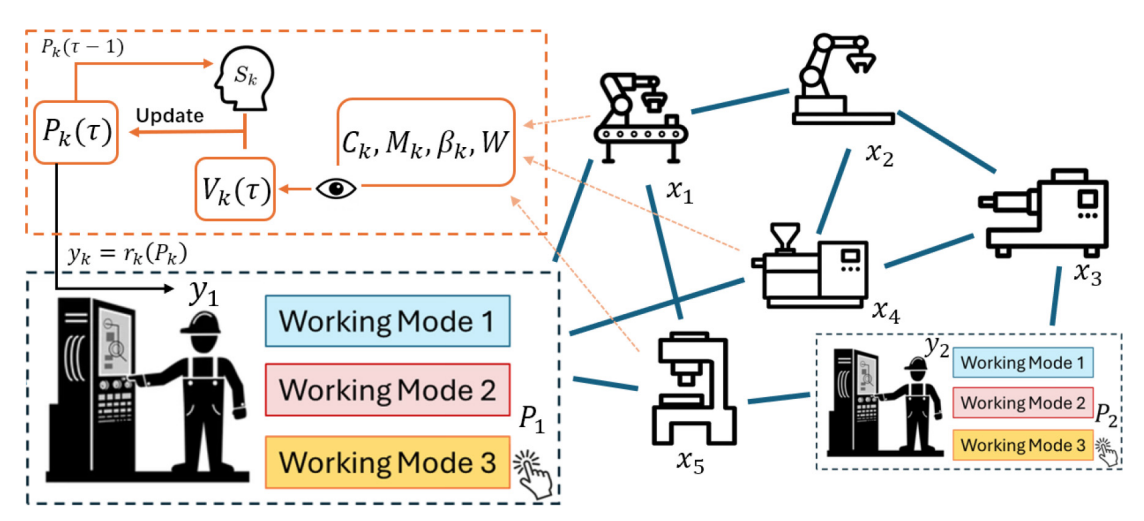
Distributed Resource Allocation for Human-Autonomy Teaming With Human Preference Uncertainty
Yichen Yao, Ryan Mbagna Nanko, Yue Wang, and Xuan Wang. IEEE Control Systems Letters.
It develops a distributed optimization framework that incorporates human response models and enables autonomous agents
to coordinate resource decisions while accounting for preference uncertainty in human teammates.
Paper
GitHub
Distributed Optimization, Control, and Resilient Computing
We develop distributed algorithms for optimization, consensus, linear equation solving,
information fusion, and resilient decision making in networked systems with communication
constraints and adversarial failures.

Resilience for Distributed Consensus with Constraints
Xuan Wang, Shaoshuai Mou, and Shreyas Sundaram. IEEE Transactions on Automatic Control, accepted, 2025.
Resilient consensus algorithms for constrained distributed networks under hostile behavior.
Paper

Constrained Consensus-Based Distributed Optimization with Integral Feedback
Xuan Wang, Shaoshuai Mou, and B. D. O. Anderson. IEEE Transactions on Automatic Control, 2022.
Integral-feedback distributed optimization with reduced communication and exponential convergence.
Paper

Scalable, Distributed Algorithms for Solving Linear Equations via Double-Layered Networks
Xuan Wang, Shaoshuai Mou, and B. D. O. Anderson. IEEE Transactions on Automatic Control, 2020.
Double-layered network structure for scalable distributed linear-equation solving.
Paper
Distributed Algorithm with Resilience for Multi-Agent Task Allocation
Xuan Wang, Jeffrey Hudack, and Shaoshuai Mou. IEEE ICPS, 2021.
Best Paper Award. Auction-consensus task allocation with resilience to temporal attacks.
Paper
Data-Driven Control of Networked Systems
Beyond robot teams, we use data-driven control and reconstruction methods to understand
networked dynamics, including neural mass models and fMRI-based system identification.

Reconstructing brain causal dynamics for subject and task fingerprints using fMRI time-series data
Dachuan Song, Li Shen, Duy Duong-Tran, and Xuan Wang. Health Information Science and Systems.
Dynamics reconstruction for subject and task identification from fMRI time-series data.
Paper
Video

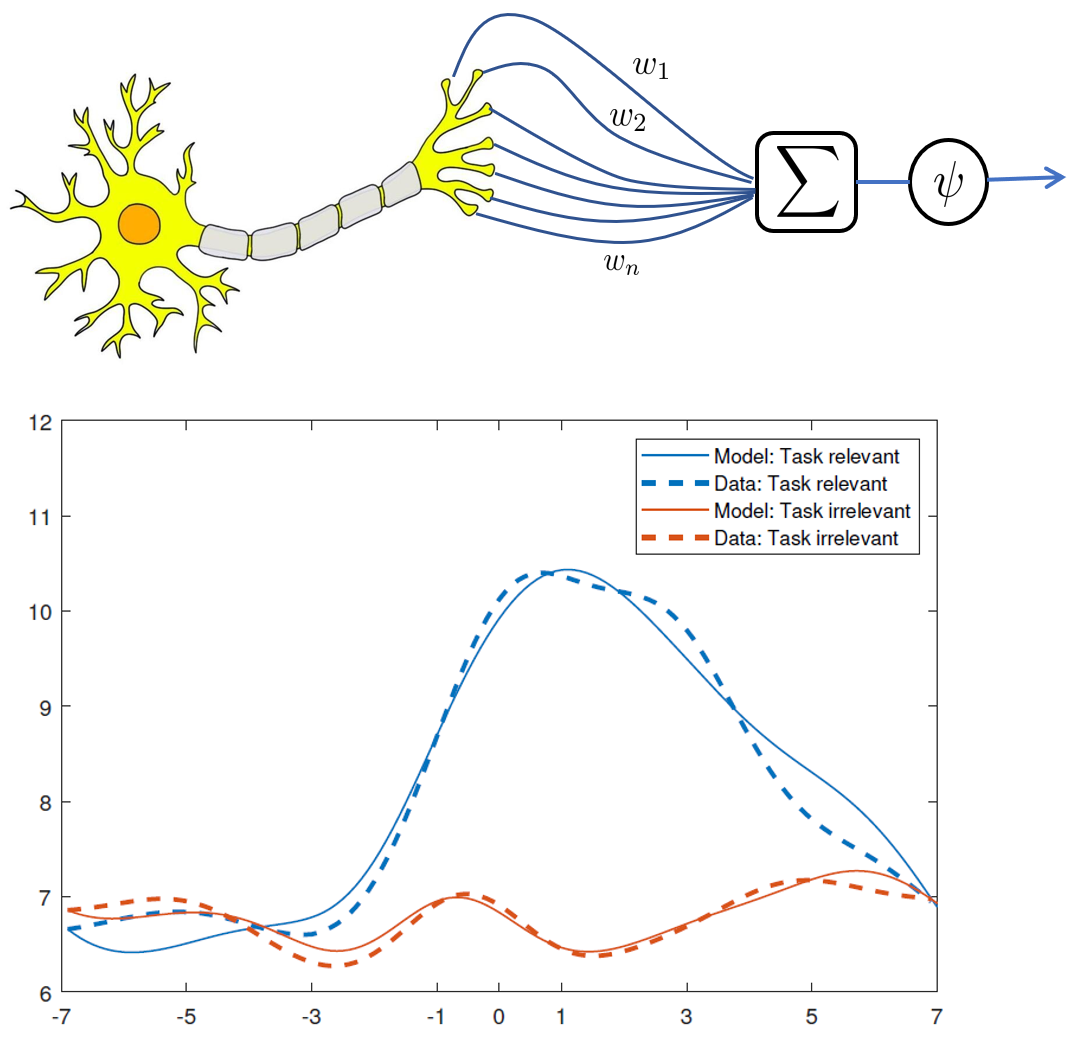
Efficient Reconstruction of Neural Mass Dynamics Modeled by Linear-Threshold Networks
Xuan Wang and Jorge Cortes. IEEE Transactions on Automatic Control, 2025.
Data-driven reconstruction of network dynamics from observed time-series behavior.
Paper
Data-Driven Control of Linear-Threshold Network Dynamics
Xuan Wang and Jorge Cortes. American Control Conference, 2022.
Model-free control methods for linear-threshold network dynamics.
Paper
Cooperative SLAM, Localization, and State Estimation
We design consistent state-estimation methods for multi-robot localization and navigation,
combining visual-inertial sensing, UWB/ranging, Lie group structure, and distributed
cooperative estimation.
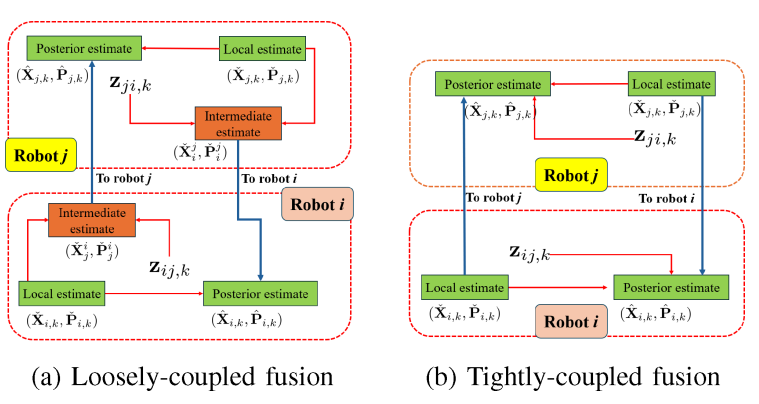
Distributed 3-D Multi-Robot Cooperative Localization: An Efficient and Consistent Approach
Yizhi Zhou, Yufan Liu, and Xuan Wang. IEEE Robotics and Automation Letters.
This paper proposes a distributed cooperative localization method for multi-robot systems in 3-D environments.
By performing information fusion directly on Lie groups, the method accounts for nonlinear 3-D rotations and translations
while preserving observability consistency in distributed localization.
Paper
Supplement
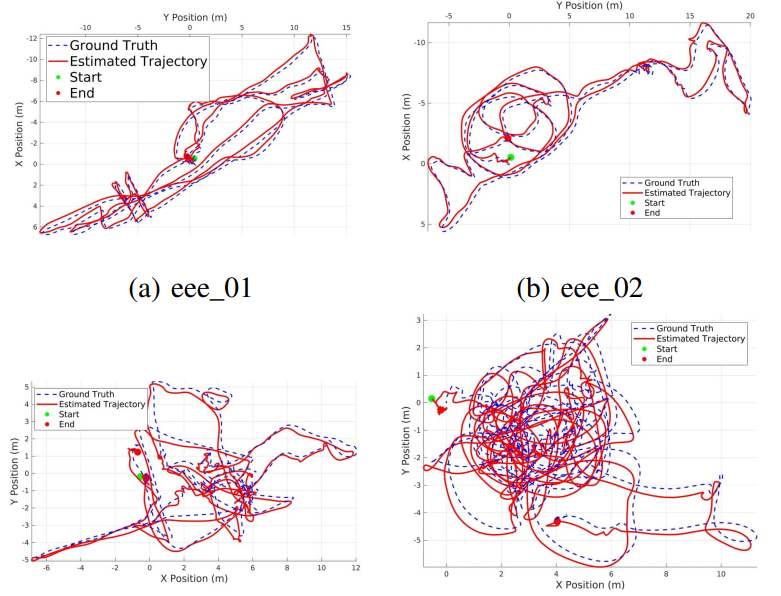
CVIRO: A Consistent and Tightly-Coupled Visual-Inertial-Ranging Odometry on Lie Groups
Yizhi Zhou, Zhe Kang, Junyi Xia, and Xuan Wang. IEEE/RSJ IROS, 2025.
Tightly coupled visual-inertial-ranging odometry with consistency on Lie groups.
Paper
Supplement
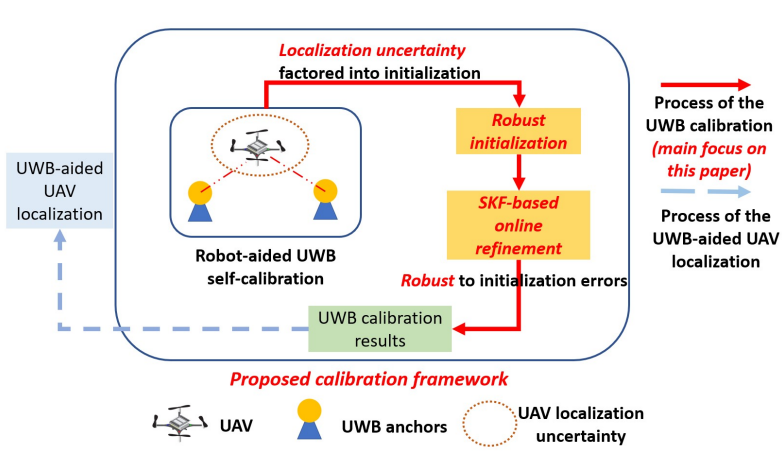
Robust Online Calibration for UWB-Aided Visual-Inertial Navigation with Bias Correction
Yizhi Zhou, Jinle Xu, Junyi Xia, Zechen Hu, Weizi Li, and Xuan Wang. IEEE/RSJ IROS, 2025.
Robust online calibration and bias correction for UWB-aided visual-inertial systems.
Paper
Supplement