Sponsor: National Science Foundation (NSF)
Award No: ECCS-2218517
Principal Investigator: Ningshi Yao, George Mason University
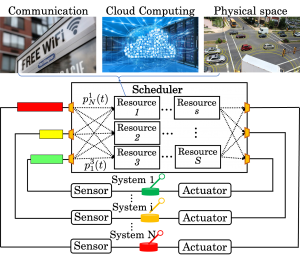
Project Description: With the large scale of systems and data in modern industries and smart cities, shared resources, such as cloud computing, communication network, and power grid, are widely used to reduce system cost and increase maintainability. When multiple systems need access to shared resources at the same time and the total demands exceed the total supply, a contention occurs. Contentions can cause loss of information, time delay or even life-threatening safety issues. Therefore, how to schedule systems to resolve contentions is a generic problem for the control of complex systems that are coupled or connected through shared resources. To help address this problem, this project will develop transformative control techniques to co-design scheduling and control strategies for resource constrained control systems. The project combines insightful engineering with sophisticated mathematics, towards the goal of producing practically useful approaches that have rigorous performance. Once validated and transitioned to actual applications, the strategies developed by this project will have the potential to reduce congestion and pollution from traffic and transportation systems and benefit both human society and natural environment. Through a series of strongly integrated research, educational, and outreach activities, the project will also help broaden participation of underrepresented groups in STEM research.
This project addresses three main questions to advance the control theory regarding to connected systems with shared resources: how to develop a general method which can co-design the scheduling and control in a unified theoretical framework; how to compute a co-design solution efficiently online for real-time systems; and how to address real-world uncertainties in the co-design problem. To answer these questions, this project will develop a robust contention-resolving model predictive control (or MPC) method as the unified theoretical framework. Analytical timing models will be established in the context of parallel machines, flow shop, and job shop scheduling to model different types of real-time control systems with shared resources. Then based on the timing models, an event-triggered MPC will be designed to achieve fast enough computation in real-time. To compensate uncertainties, the project will also develop a robust design based on forward invariant set for contention-resolving MPC to guarantee performance under system disturbances and perturbed event timing. The proposed approaches will be validated through realistic simulation software packages and field experiments to test the designs under realistic uncertainties and variations. The overall framework will be general for various applications including higher dimensional systems that are of compelling ongoing interest in engineering.
Publications:
- Renke Wang and Ningshi Yao, “Robust Contention-resolving Model Predictive Control for Networked Control Systems with Time Perturbations”, in Proc. 2023 IEEE Conference on Decision and Control (CDC), under review.
Preliminary publications:
-
Ningshi Yao and Fumin Zhang, “Contention-Resolving Model Predictive Control for Scheduling and Controlling Automated Vehicles at an Intelligent Traffic Intersection,” in Discrete Event Dynamic Systems: Theory and Applications, 2021, https://doi.org/10.1007/s10626-020-00336-8. Available online
-
Ningshi Yao, Michael Malisoff and Fumin Zhang, “Contention-Resolving Model Predictive Control for Coupled Control Systems with a Shared Resource,” in Automatica, 122, 109219, 2020. Available online [bibtex]
-
Zhenwu Shi, Ningshi Yao, and Fumin Zhang, “Scheduling Feasibility of Energy Management in Micro-grids Based on Signicant Moment Analysis,” in Cyber-Physical Systems: Foundations, Principles and Applications, 431-450, Elseiver, 2017. Available online [bibtex]
- Ningshi Yao and Fumin Zhang, “Event-triggered Scheduling and Control Co-design for Networked Control Systems with Sub-schedulability”, in Proc. 2022 American Control Conference (ACC), Atlanta, GA, 2022, Accepted.
- Ningshi Yao and Fumin Zhang, “Optimal Real-time Scheduling of Human Attention for a Human and Multi-robot Collaboration System”, in Proc. 2020 American Control Conference (ACC), 30-35,Denver, CO, 2020. Available online [bibtex]
- Ningshi Yao, Michael Malisoff and Fumin Zhang, “Contention-Resolving Model Predictive Control for Coordinating Automated Vehicles at a Traffic Intersection”, in Proc. 2019 IEEE Conference on Decision and Control (CDC), 2233-2238, Nice, France, 2019. Available online [bibtex]
- Ningshi Yao and Fumin Zhang, “Resolving Contentions for Intelligent Traffic Intersections using Optimal Priority Assignment and Model Predictive Control”, in Proc. 2018 IEEE Conference on Control Technology and Applications (CCTA), 632-637, Copenhagen, Denmark, 2018. Available online [bibtex]
- Ningshi Yao, Michael Malisoff and Fumin Zhang, “Contention Resolving Optimal Priority Assignment for Event-Triggered Model Predictive Controllers,” in Proc. 2017 American Control Conference (ACC), 2357-2362, Seattle, WA, 2017. Available online [bibtex]