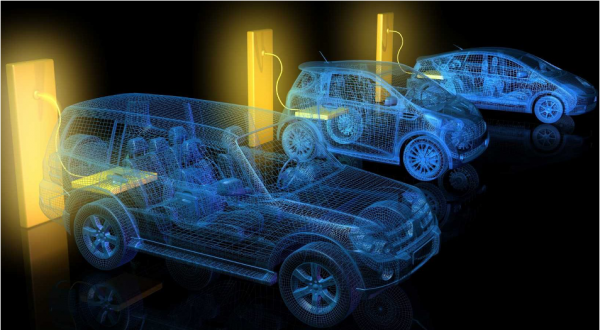
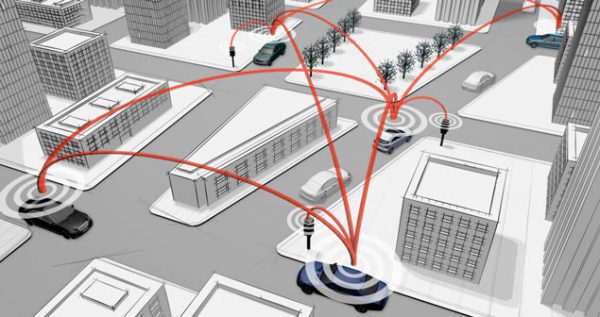
This research project would develop transformative control techniques to co-design scheduling and control strategies for complex cyber physical human systems (CPHSs) with coupled shared resources, which can be implemented in real-time… read more
Allocate charging stations to EVs
Scheduling self-driving vehicles at traffic intersections
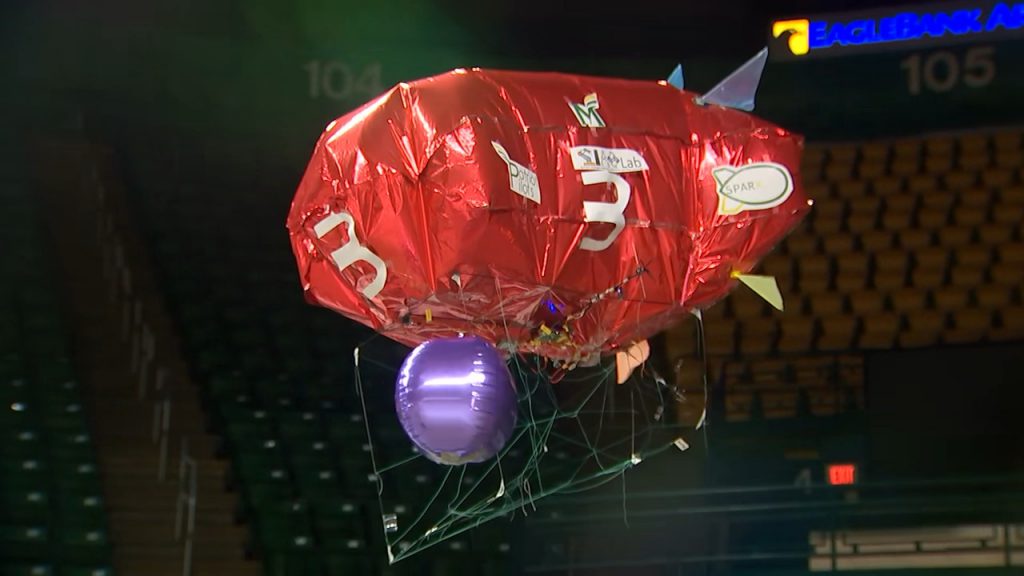
This project aims to build robotic agents that can robustly operate in dynamic and contested environments using sensor-actuator pairs that are distributed in the system. We are also participating in the Defend The Republic robotic blimp competition, which is a Navy sponsored aerial soccer-game type competition. The last competition was hosted at Eagle Bank Arena on April 24-28, 2023 and was featured on Fox 5 and NBC 4 News…read more
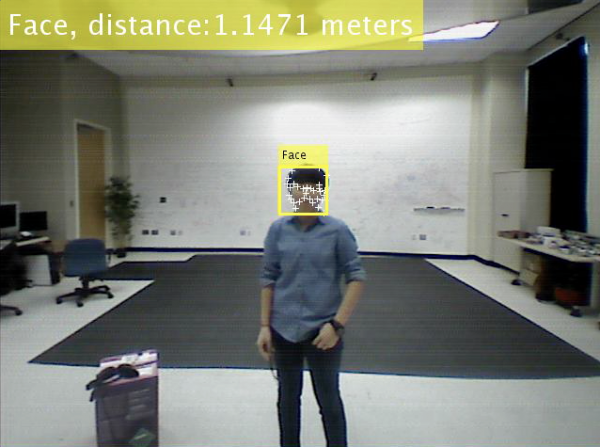
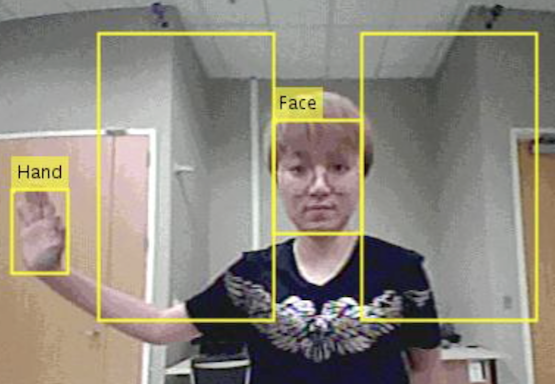
In this project, we presented an approach that allows the robotic blimp to detect and follow a human. This accomplishment is the first Human Robot Interaction (HRI) demonstration between an uninstrumented human and a robotic blimp…read more