Distributed Intelligence with Lighter-Than-Air Vehicles
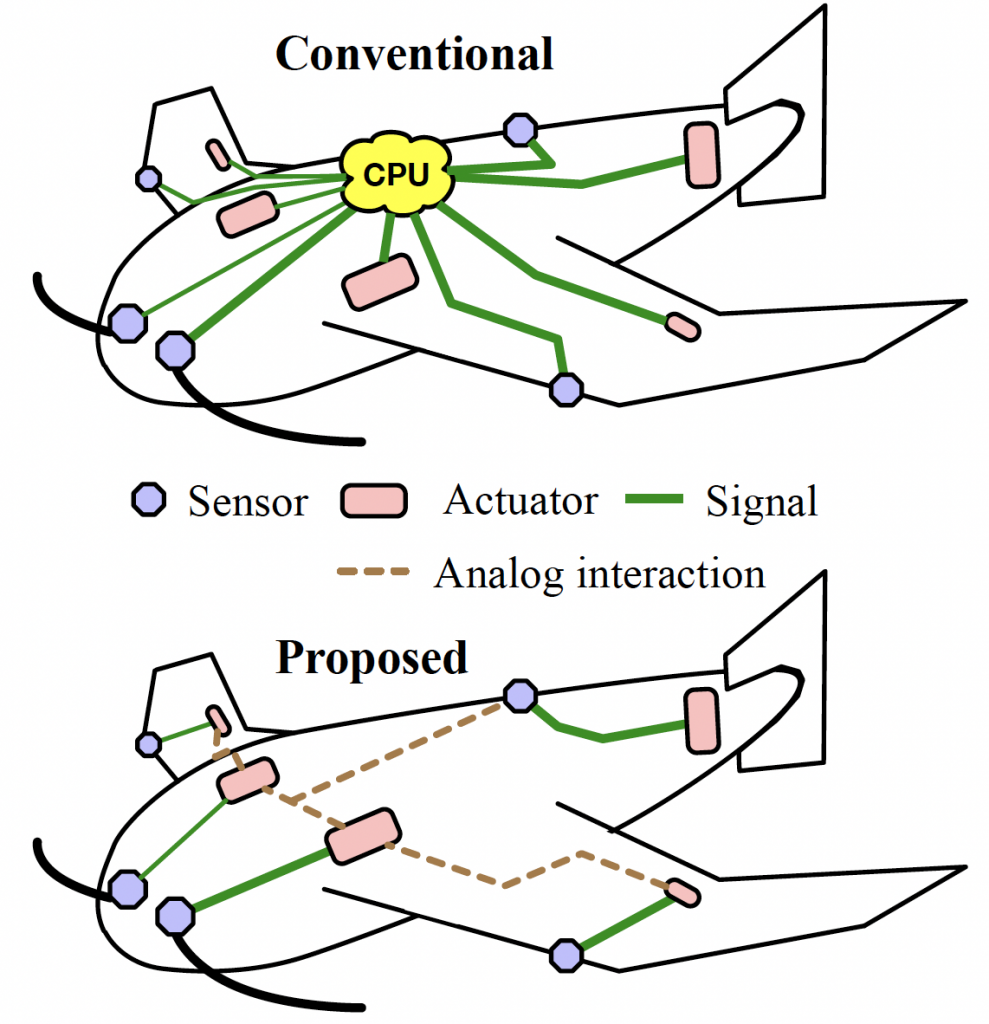
Project Description: This project aims to build robotic agents that can robustly operate in dynamic and contested environments using sensor-actuator pairs that are distributed in the system. We address two weaknesses that conventional robot design approach has: the centralized architecture reliant on CPU that causes brittleness, and the top-down approach based on idealized mathematical models that forces us to pursue precision. We explore the viability of a bottom-up approach in building intelligence into a robot or a group of robots using individually weak components that interact with each other. We will specifically study how those components can utilize analog interaction for achieving faster response time and better tolerance to imprecision. Through the case-studies using Lighter-Than-Air (LTA) vehicles, we seek to characterize the robustness of such systems and construct a generalizable theory for their analysis. The main challenge in achieving these objectives is the lack of systematic design method and the general difficulty in predicting the emergent behavior of a distributed system. In addition, physically-grounded analog components have limited flexibility to function as interfaces when compared to the digital / software approach.
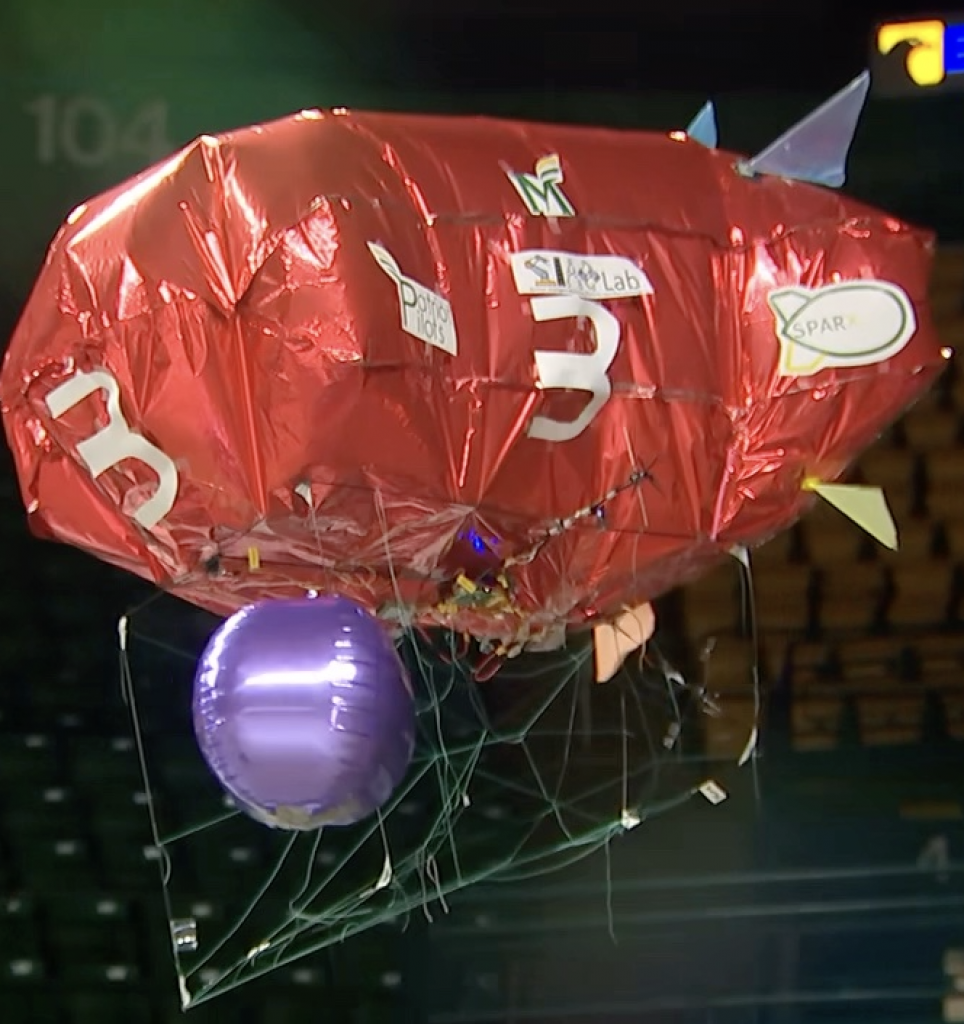
We are also competing in the Defend The Republic competition, which is a Navy sponsored aerial soccer-game type competition. The last competition was hosted at Eagle Bank Arena on April 24-28, 2023 and was featured on Fox 5 and NBC 4 News