Remotely Monitored & Controlled Car
This was a collaborative effort with my fellow student Wes Tarro. Please visit his page at:http://mason.gmu.edu/~wtarro/ece-499/demo1/
System Architecture
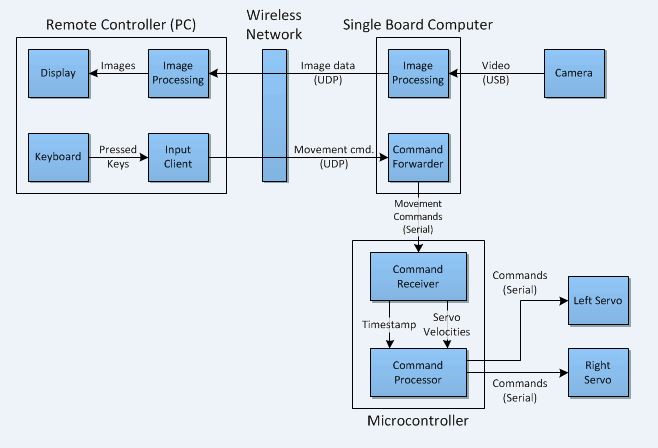
Our architecture consists of a remote controller which will feed in movement commands to the single board computer over a wireless network. The single board computer will send the commands to the microcontroller to control the servos. To localize the robot, a camera will be attached to the single board computer, and it will then feed back the video frame to the remote controlling PC.
Software Flowcharts
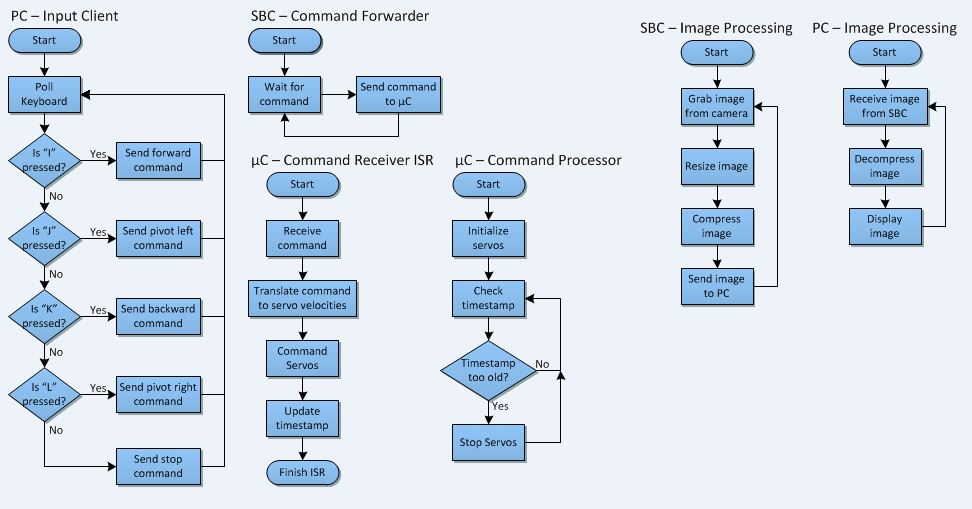
These are the flow charts that illustrate the behavior of software algorithms implemented on the remote PC, the single board computer, and the microcontroller.
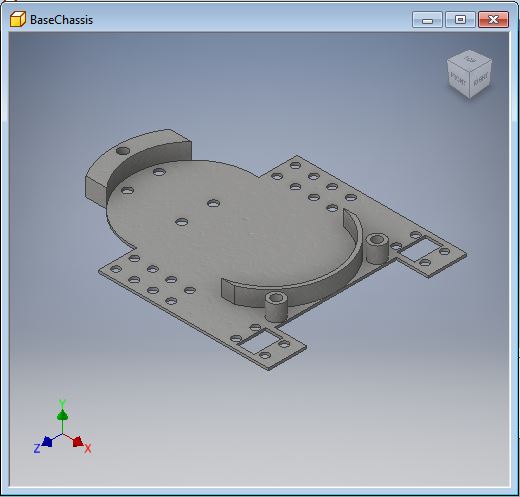
Physical Design
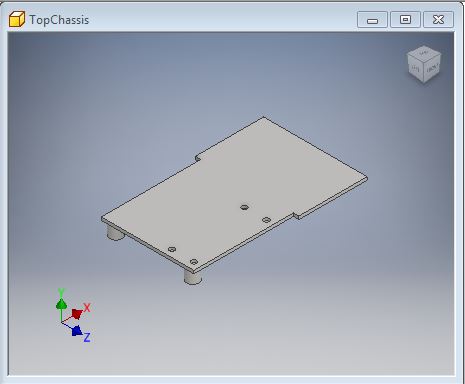
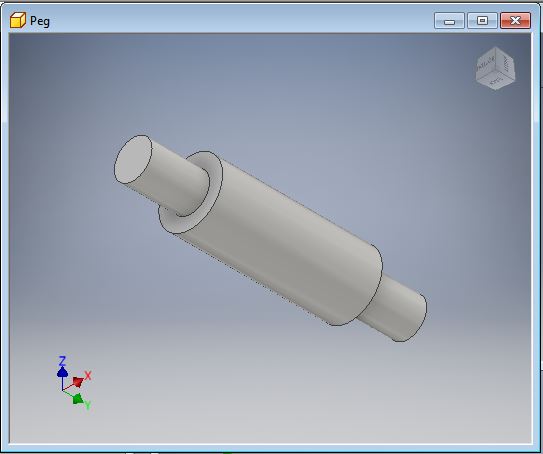
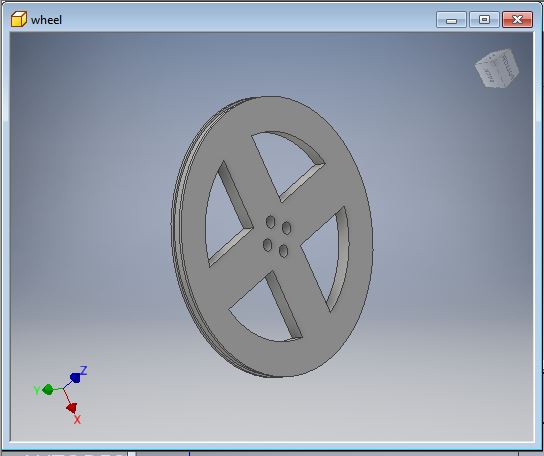
The structure of the car was designed using AUTODESK Inventor. Here are the four main components of the design: The base chassis, the top chassis, the connecting pegs, and the wheels.
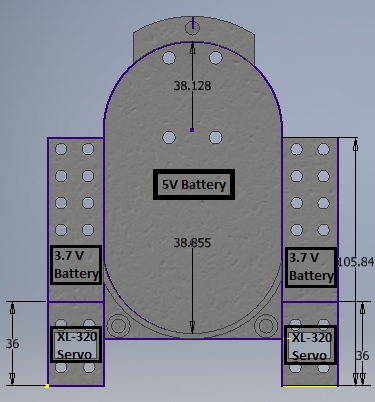
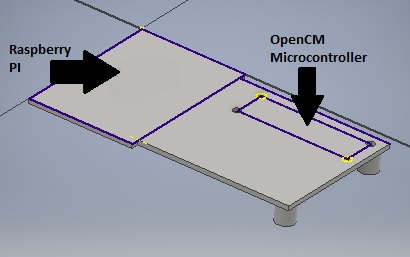
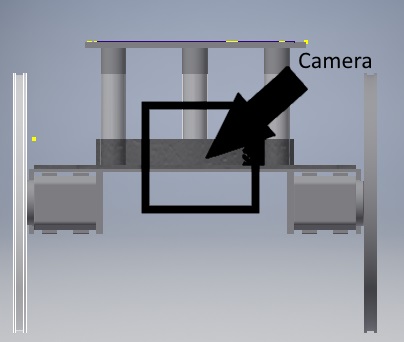
The following images outline the layout where the batteries, XL-320's, OpenCM microcontroller, Raspberry PI, and camera will reside.
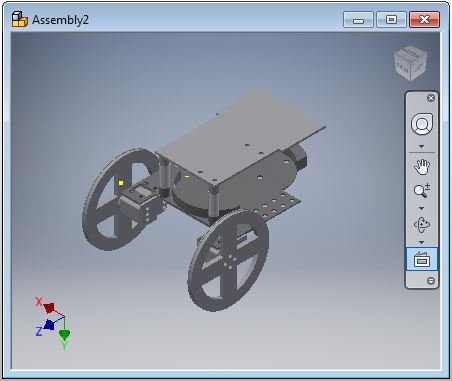
Lastly is the image of the assembly of the 3D printed parts that make up the car. (not pictured is the single wheel caster in the back of the vehicle)
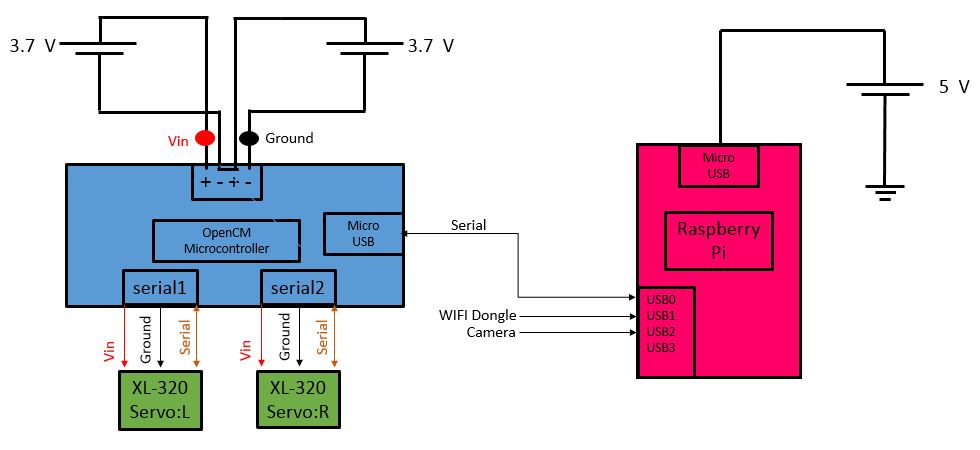
Electrical Design
Below is the diagram outlining the connections of the electrical components of the system. The Raspberry Pi is powered by an external 5V source. A wifi dongle and camera will be inputs to the Pi. A bidirectional connection will be established between the OpenCM microcontroller and the Pi via USB. The XL-320's will receive power, ground, and serial data from the microcontroller. The microcontroller will be powered by two external 3.7V batteries.