Novel Maneuvers for High-Speed Aerospace Vehicle with Reinforcement Learning
High-Speed Flight Systems are limited in their ability to execute real-time maneuvers due to their reliance on pre-computed trajectories. This research explore the use of Reinforcement Learning (RL) techniques to provide real-time guidance commands to high-speed flight systems with an objective to alter trajectory in real-time for obstacle avoidance. The project also seeks to investigate and develop test and evaluation methods for implmentation of RL based solutions in aerospace systems.


Artificial Intelligence and Advanced Analytics for SAFE-SIM
System of systems comprise of multiple large scale and complex adaptive systems that can be opportunistically, flexibly, and intelligently integrated to achieve one or more mission outcomes. The decision space for integration of systems and tasking of mission becomes extensive and often computationally intractable in this case, leaving the mission designers and analysts with limited to no means for identifying right course of action. Leveraging the advances in Artificial Intelligence (AI), Explainable AI, Data Analytics, and complex adaptive systems theory, this project is developing tailored analytical methods for analysis and design space comprehension of large scale simulations.
High-Level Data Fusion Architecture for Counter Unmanned Aerial Systems
Low cost unmanned aerial systems (UAS) pose a significant threat to military and civilian establishments throughout the world. Many recent events has emphasized the significance of countering the threat posed by UAS and as a result many siloed and one-of-a-kind solutions have been proposed. Utilizing the state-of-the-art in model-based systems engineering (MBSE) and advances in sensor data fusion, this project aims to develops a flexible reference architecture for counter UAS (C-UAS) operation with an objective to provide opportunistic fusion between sensing resources and interoperability with exsisting C-UAS and Command and Control Systems.


Learn 2 Game Break (L2G)
Our objective in this project is to create a framework to determine how the state of balance in a real-time strategy (RTS) game can be detected, maintained and shifted with a longer-term goal of mapping the RTS game constructs to mosaic warfare between intelligent adversaries. The overall problem of balancing and breaking an RTS game can be described as learning the map between the game design (i.e., game features and rules), the resources available to a player, and the probability of a player winning the game. However, even for simple RTS games, the design space characterizing this mapping becomes extensive and requires a systematic methodology for deriving inferences from game design and player actions to device strategies towards balancing and breaking a game in otherwise computationally prohibitive combinations of factors.
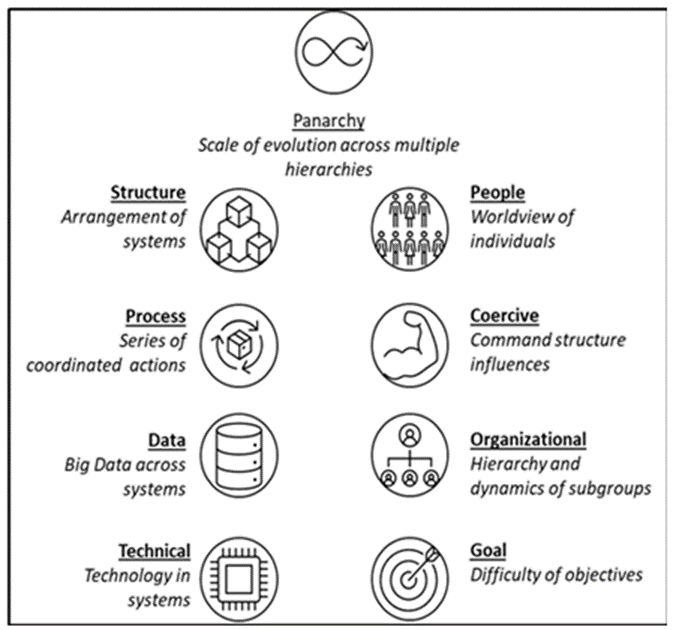
Image CreditManaging Complexity in Distributed Command and Control (C2) Systems and System of Systems
Pursuit of greater distributed functionality in present and future systems is a challenge filled with great reward and risk. However, there is complexity that is introduced as we move towards a more distributed paradigm, especially complexity related to other-than-technical aspects of functionality. In this project, we present a family of “lenses” on complexity that provide insight on striking the risk/reward balance in evolving and designing future distributed systems. A key finding is that, while complexity is most often thought to pertain to technical aspects and technicality of functions, the reality is that the other dimensions of complexity (e.g., organizational complexity, process complexity, data complexity, and people complexity) are as important, if not more, for understanding distributed operations in Command and Control Systems and System of Systems.
Related Publications:
Raz et al., "Managing System of Systems Complexity for Distributed Operations", To Appear in AIAA Complex Aerospace Systems Exchange, 2022 (in publication)
Raz et al., "Managing Complexity in Distributed Command and Control (C2) Systems", to be published in the Journal of Defense Technical Information Center, (TBD)