Activity I: Locating a Receiver
Suppose we had \(n\) satellites, where the i\(^{\text{th}}\) satellite had a cartesian position of \( \left(A_i,B_i,C_i\right) \). Then, we can imagine a sphere whose radius \(R_i\) is the distance between the receiver and the i\(^{\text{th}}\) satellite. By considering the speed of the signal \(c \approx 299792.458 \frac{\text{km}}{\text{s}}\), the time \(t_i\) it takes for the receiver to get the signal, and the difference \(d\) between the reciever's clock and the satellite's atomic clock, we have that \(R_i = c\left(t_i - d \right) \). With this formulation, we can determine the location of the receiver by finding the intersection all \(n\) spheres.
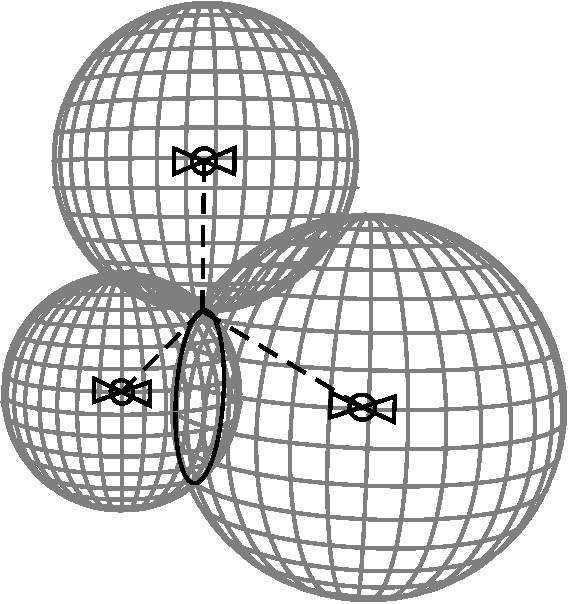
This equates to solving the system of \(n\) nonlinear equations, where any equation is as follows: \[f_i(x,y,z,d) = (x-A_i)^2 + (y-B_i)^2 + (z-C_i)^2 - \left(c(t_i - d)]\right)^2 = 0\] In euclidean space, intersecting spheres may at most intersect at two locations, but in the context of this situation, one possible solution will seem far from Earth. So now we consider having four satellites. Letting \(v = (x,y,z,d)\), and \(F(v)\) be a matrix of the \(f_i\) functions, then using multivariate Newton's Method allows iteration from an initial guess \(v_0\) toward the function's \(F\) two possible roots; and thus, the two possible locations of the receiver. The computationally efficient form of the method found in section 2.7 of the textbook (pg. 132) is:
\begin{align} DF(v_k)s&=-F(v_k)\\ v_{k+1}&=v_k+s \end{align}
Where, the vector valued function \(F(v)\) and the Jacobian matrix \(DF(v)\) are explicitly defined as:
\begin{align} F(v) &= \begin{bmatrix} f_1(x,y,z,d)\\ f_2(x,y,z,d)\\ f_3(x,y,z,d)\\ f_4(x,y,z,d) \end{bmatrix}\\\\ DF(v) &=\begin{bmatrix} \frac{\partial f_1}{\partial x} & \frac{\partial f_1}{\partial y} & \frac{\partial f_1}{\partial z} & \frac{\partial f_1}{\partial d}\\ \frac{\partial f_2}{\partial x} & \frac{\partial f_2}{\partial y} & \frac{\partial f_2}{\partial z} & \frac{\partial f_2}{\partial d}\\ \frac{\partial f_3}{\partial x} & \frac{\partial f_3}{\partial y} & \frac{\partial f_3}{\partial z} & \frac{\partial f_3}{\partial d}\\ \frac{\partial f_4}{\partial x} & \frac{\partial f_4}{\partial y} & \frac{\partial f_4}{\partial z} & \frac{\partial f_4}{\partial d} \end{bmatrix} \end{align}
The partial derivatives of \(f_i\) are:
\[\begin{array}{cccc} \frac{\partial f_i}{\partial x}= 2(x - A_i), & \frac{\partial f_i}{\partial y} = 2(y - B_i), & \frac{\partial f_i}{\partial z} = 2(z - C_i), & \frac{\partial f_i}{\partial d} = 2c^2(t_i - d) \end{array} \]
From there, Guassian elimination will approximate the root in \(\frac 2 3 n^3 \approx 43\) operations per iteration. After implementing multivariate Newton's Method as a MATLAB function (newtgps), we tested it using the sample data.
| Satellite Data | ||||||||||||||||||||
|
||||||||||||||||||||
| Initial Vector \(v_0\) | ||||||||||||||||||||
|
||||||||||||||||||||
| Expected Near Earth Solution | ||||||||||||||||||||
|
The function successfully approximated both solutions. In the case of the near earth solution, this was to all digits of accuracy given. The distant solution was compared to the result of activity 2 to gauge its accuracy.
| Multivariate Newton's Method Results | |||||||||||||||
|