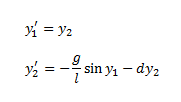
We were first asked to look at a simple pendulum. The only forces acting on it were gravity and a damping
factor (eg. air resistance). The pendulum was modeled with the following equations:
h = .005, Initial Angle: π/2 | h = .01, Initial Angle: π/2 |
For this set of initial conditions, the distance the pendulum | Since the damping force always occurs against the direction |
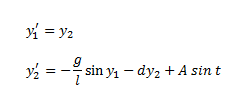
FORCE DAMPED PENDULUM DESCRIPTION
The forced damped pendulum was modeled by the following equations:
Wonjun's Site
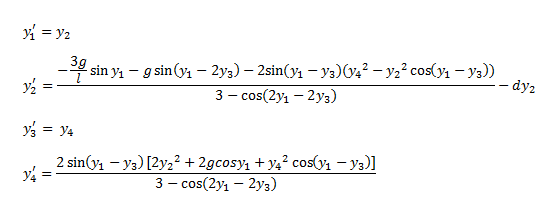
DAMPED DOUBLE PENDULUM DESCRIPTION
The damped double pendulum was modeled by the following equations:
Tame Behavior: Angle 1: 5pi/6 Angle 2: 5pi/6 | Chaotic Behavior: Angle 1: 5pi/6 Angle 2: pi/4 |
Here, the motion of the double pendulum is partially periodic. | Here, the double pendulum's behavior can hardly be described |
LIST OF MATLAB CODE:
Simple Damped Pendulum
Damped Double Pendulum
Forced Damped Pendulum 1
Forced Damped Pendulum 2
Forced Damped Pendulum 3
Credit Dylan: Simple Damped Pendulum, Website, Equation Images
Credit Wonjun: Force Damped Pendulum, (problems 5,6,7)
Credit Don: Double Pendulum, Implementing Polar Graphs, Debugging, Having Graph Paper to Organize the Labor