function harris_matching()
windowSize = 15;
I1 = rgb2gray(imread('cathedral1.bmp'));
corners1 = harris_corners(I1, 7,1.5);
I2 = rgb2gray(imread('cathedral2.bmp'));
corners2 = harris_corners(I2, 7,1.5);
map = zeros(min(size(corners1, 1), size(corners2, 1)) , 1);
for i = 1 : size(map)
minError = Inf;
ind = 0;
for j = 1 : size(map)
err = ssd(I1, corners1(i,1), corners1(i,2), ...
I2, corners2(j,1), corners2(j,2), windowSize);
if (err < minError)
minError = err;
ind = j;
end
end
map(i) = ind;
end
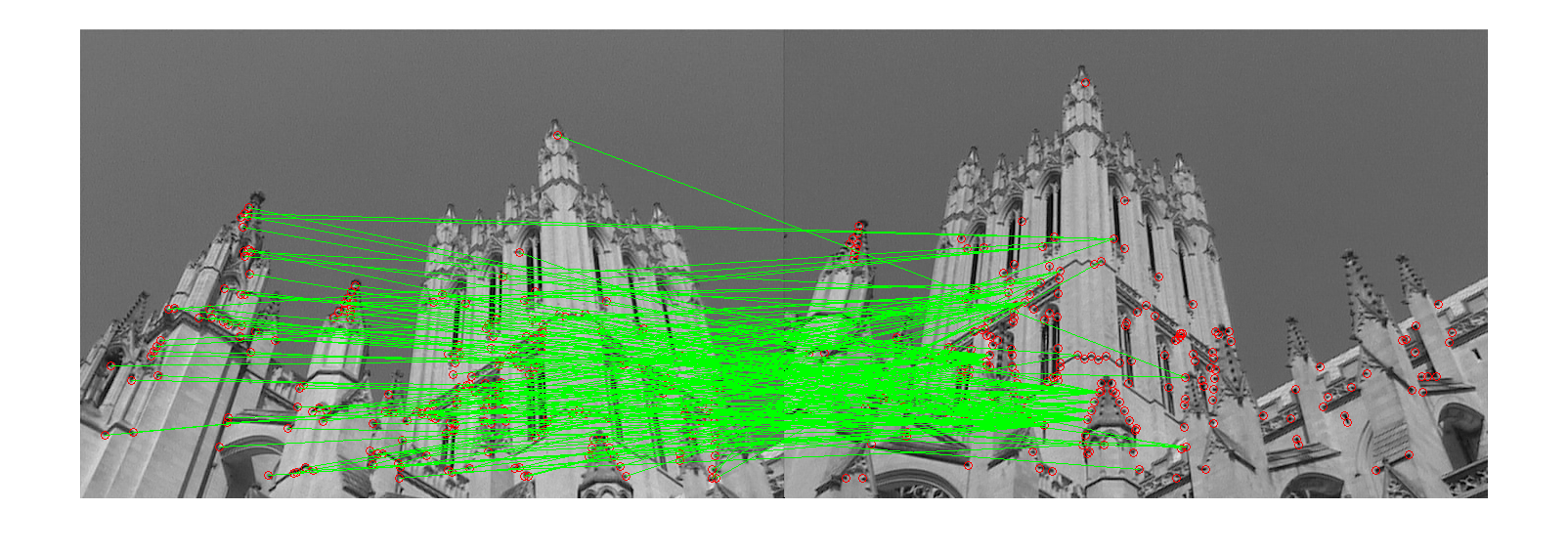
imshow(appendimages(I1,I2)); hold on;
plot(corners1(:,1), corners1(:,2), 'ro'); hold on;
plot(size(I1,2)+corners2(:,1), corners2(:,2), 'ro'); hold on;
for i = 1 : size(map)
plot([corners1(i,1) size(I1, 2)+corners2(map(i), 1)], ...
[corners1(i,2) corners2(map(i), 2)], 'g-');
end
end