T = [0;0;5];
R = [1, 0, 0;
0, cosd(20), -sind(20);
0, sind(20), cosd(20)];
K = [800, 0, 250;
0, 800, 250;
0, 0, 1];
M = [0,0,0;
1,0,0;
1,1,0;
0,1,0;
0,0,0;
0,0,1;
1,0,1;
1,1,1;
0,1,1;
0,0,1;
1,0,1;
1,0,0;
1,1,0;
1,1,1;
0,1,1;
0,1,0]';
x = project(M,R,T,K);
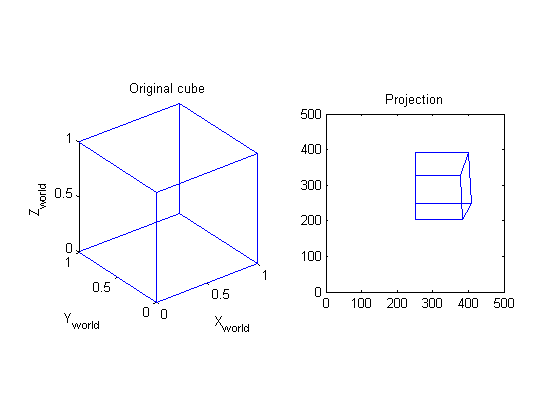
subplot(1,2,1)
plot3(M(1,:), M(2,:), M(3,:));
axis equal;
set(gcf, 'color', 'w');
xlabel('X_{world}')
ylabel('Y_{world}')
zlabel('Z_{world}')
title('Original cube')
subplot(1,2,2);
plot(x(1,:), x(2,:));
axis equal;
axis([0 500 0 500])
title('Projection')