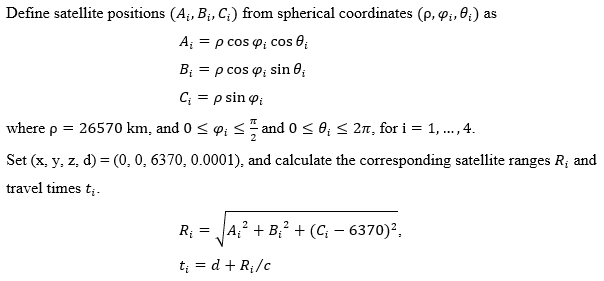
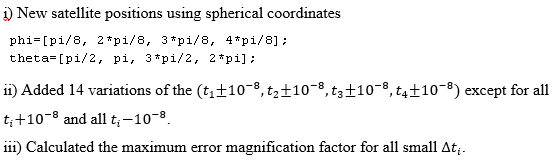
Set up new satellite locations using spherical coordinates, and find the maximum error magnification factor for all small \(\Delta t_i=10^{-8}\).

Followings are changed from Step1 code.
The maximum error magnification factor for all small \(\Delta t_i\) (condition number)
= 5.475302028519095.
Repeat Step 4 with a more tightly grouped set of satellites.
Only spherical coordinates of satellite positions were changed from Step4 code.

The maximum error magnification factor for all small \(\Delta t_i\) (condition number)
= 1.083912067236088e+05.
These tightly bunched satellites show larger condition number than the loosely bunched satellites in Step 4.
That is, tightly bunched satellites are less accurate than unbunched satellites.
Decide whether the GPS error and condition number can be reduced by adding satellites.
Return to Step 4, and add three more satellites. Now assume that we know locations of seven satellites.
Followings are changed from Step4 code. i) Seven satellite positions

ii) Random 14 variations of the \(\Delta t_i±10^-8, i=1,..,7\) though possible combination is \(2^7\).
iii) Used Gauss-Newton iteration to solve the least squares system of seven equations in four variables (x, y, z, d).
The maximum error magnification factor for small \(\Delta t_i\) (condition number)

- The bunched satellites are less accurate than unbunched satellites.
- Adding more satellites does not provide more accurate position.