Most of the road accidents have been known to be caused due to driver errors. As a result, automation of vehicles to increase highway safety and driver’s performance has gained popularity in the recent era. An example of such automation is cruise control which allows a vehicle to follow a lead vehicle in the longitudinal direction. It is the responsibility of the driver to initially set the distance between his/her vehicle and the lead vehicle, and to maintain the vehicle in the center of the lane. In this project, we propose to implement Adaptive Cruise Control using a direct Model Reference Adaptive controller (MRAC). The control objective, in this case, is to make the relative speed zero as time tends to infinity and to maintain the following distance. The vehicle model developed for this problem, based on the laws of physics and experimental data is a complex non-linear system. However, for MRAC we assume a simplified first order system.
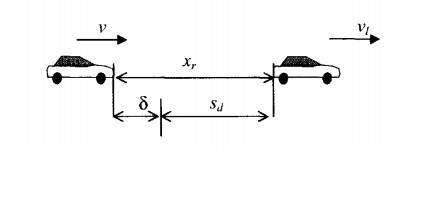
The implemented adaptive cruise control allows a vehicle to follow a lead vehicle longitudinally and maintains the spacing between the two cars very close to the desired distance. As the reference model output (speed vm) does not exactly follow the lead vehicle speed (vl), there always remains an error between the lead vehicle speed and plant speed (v). As a result of the separation error δ never becomes zero but is always very close to zero.
Future work on this project includes modification of the reference model to make it exactly follow the lead vehicle speed. Also, including the plant disturbance d back in the model will make the work more realistic. Based on the laws of physics and experimental data, the vehicle model developed for the cruise control problem is complicated and non-linear. However, for the adaptive version, we have assumed a simplified linear system. Since neural networks can be used to approximate non-linear functions, we can apply neural networks to design adaptive control laws for a non-linear model. Developing a neuroadaptive approach for cruise control and comparing the performance with adaptive cruise control could be a prospective future inclusion in this work.