David Hatch
George Mason University
Co-operative Robotics
Overview: The objective of this project was to build a walking robot capable of navigating rough terrain that would work co-operatively with an autonomous crane to sucessfully place a block in the designated area.
Co-operative Robotics Youtube Video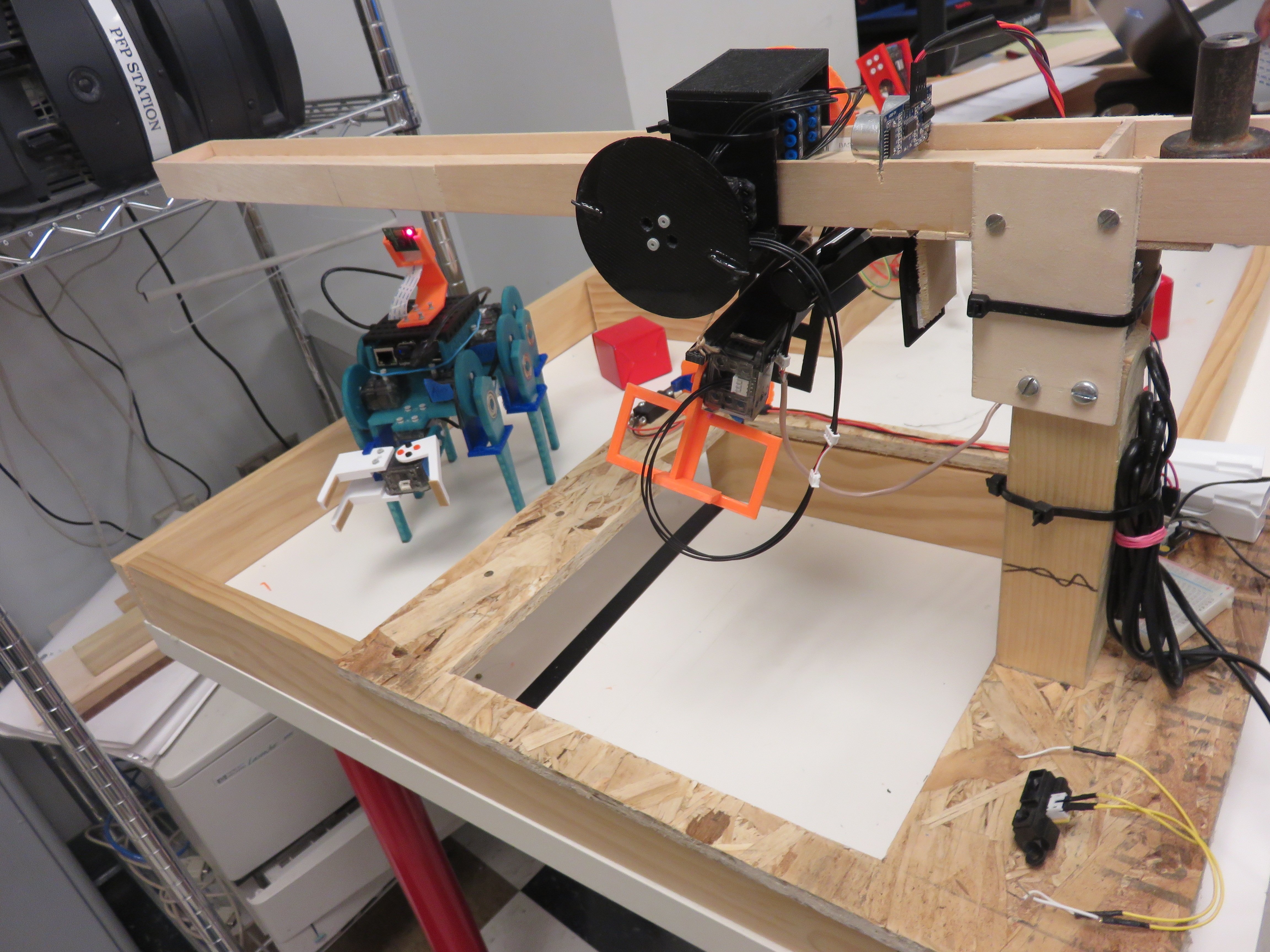
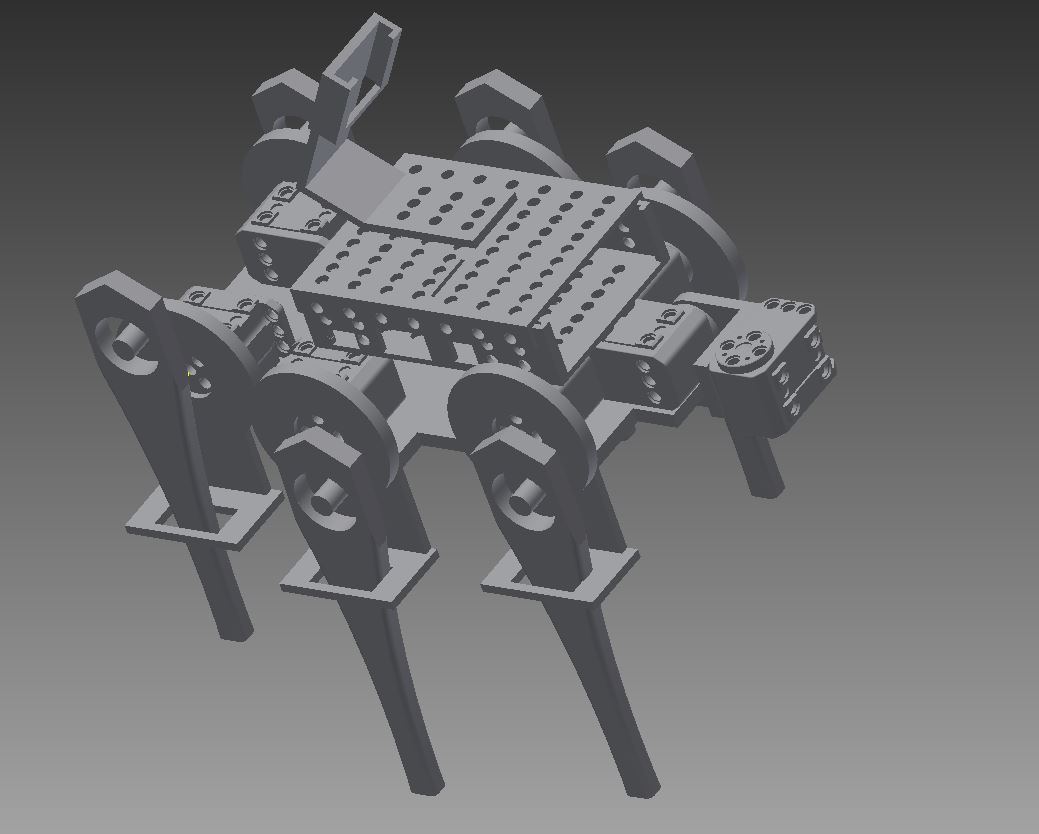
Walker Design:
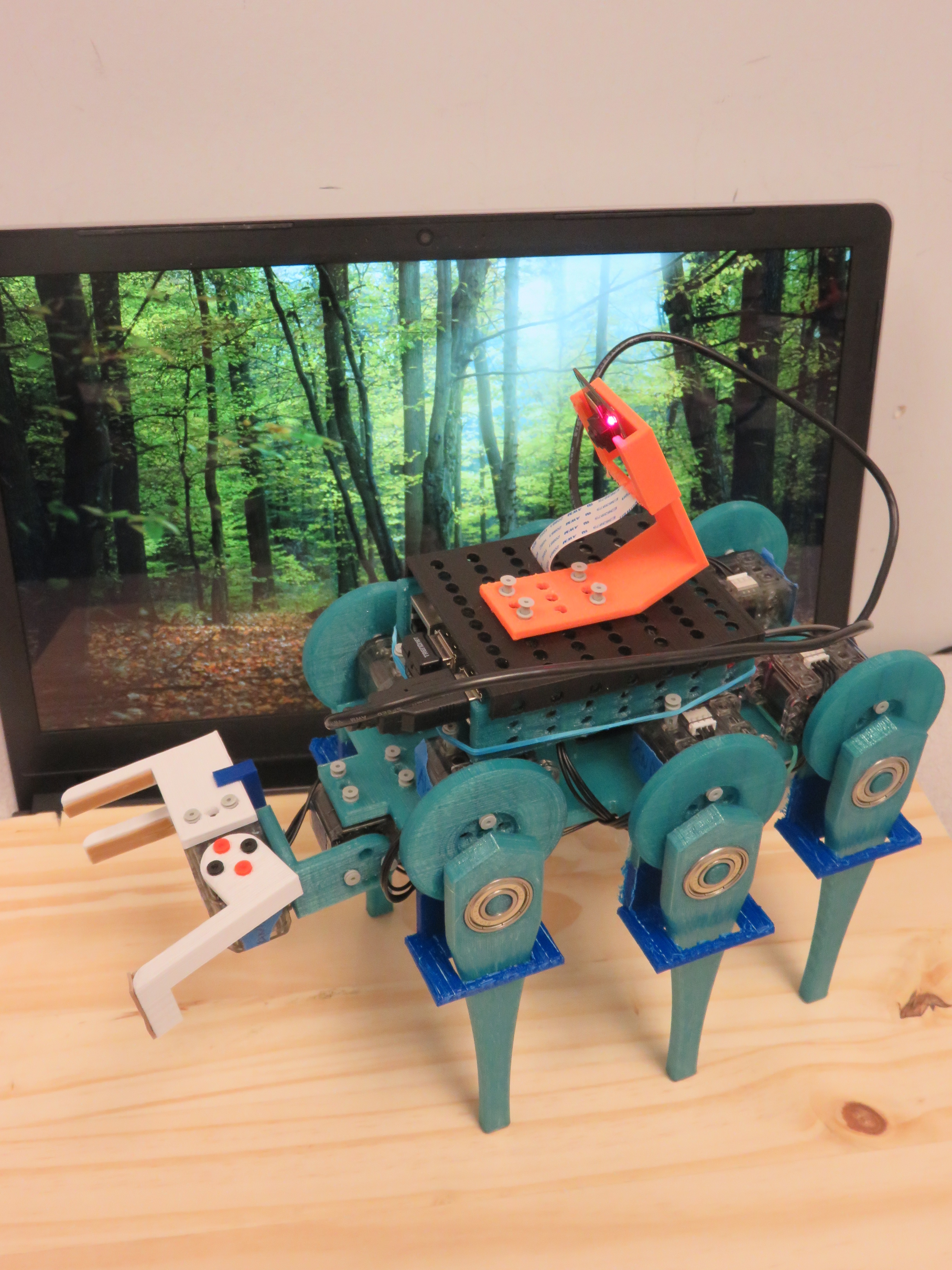
Mechanical Design:
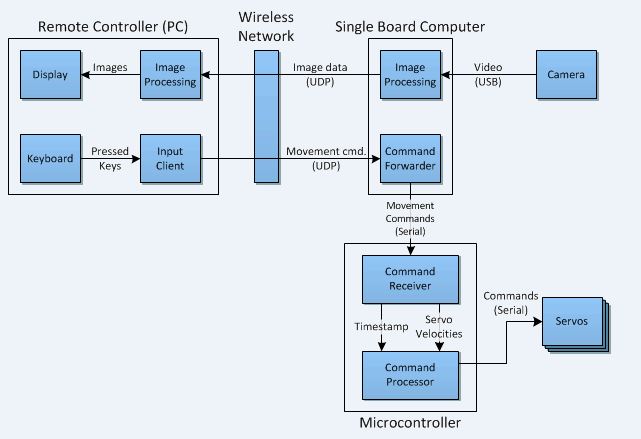
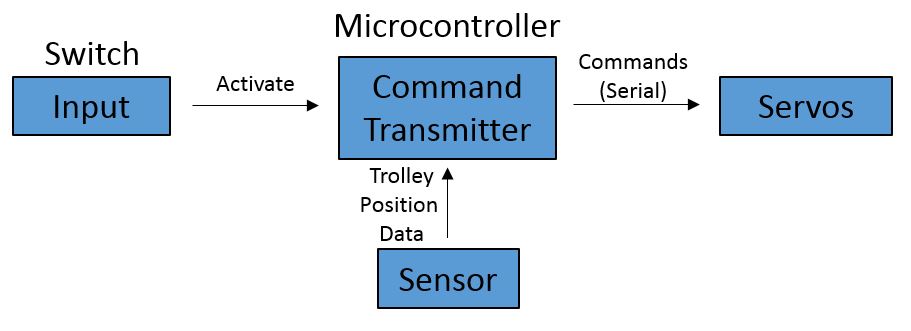
System Architecture:
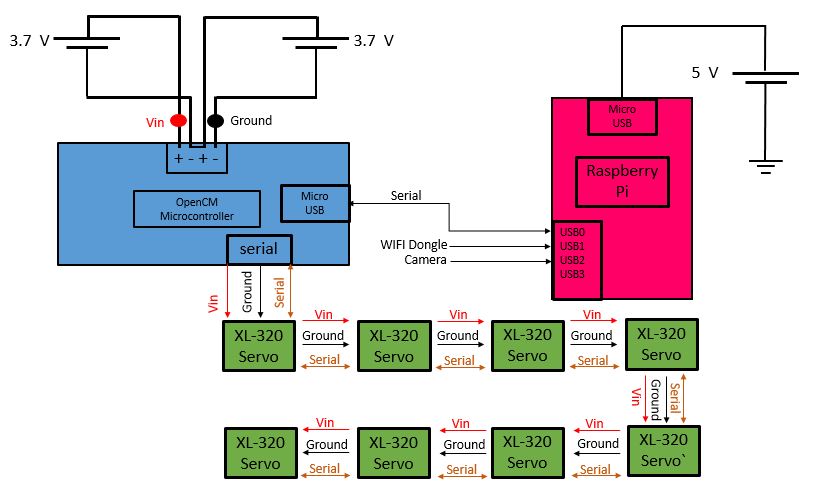
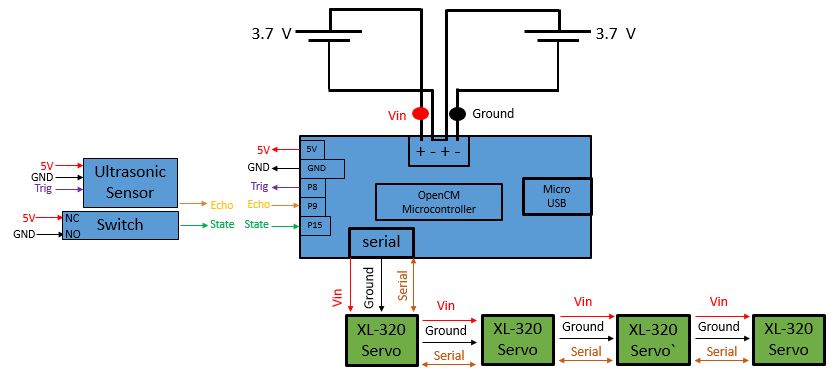
Electrical Design:
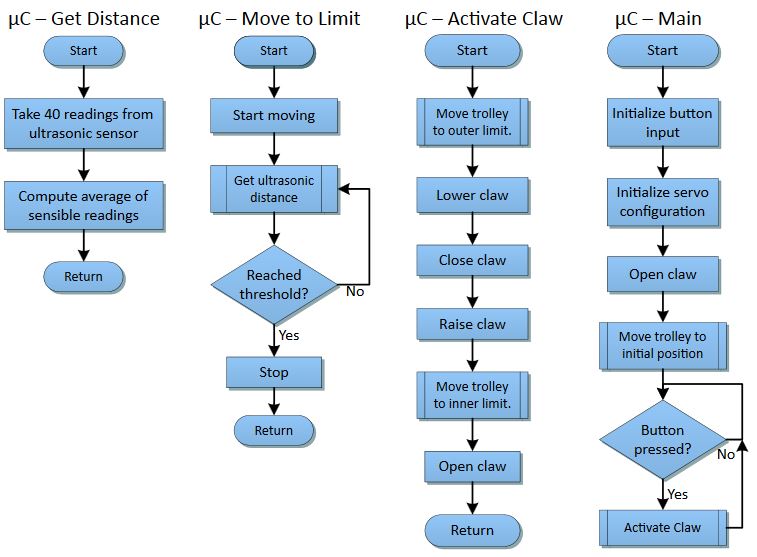
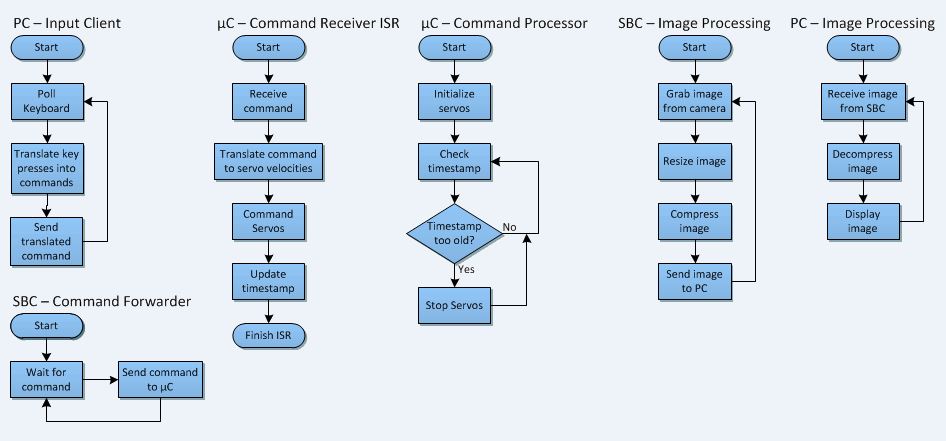
Software Diagram:
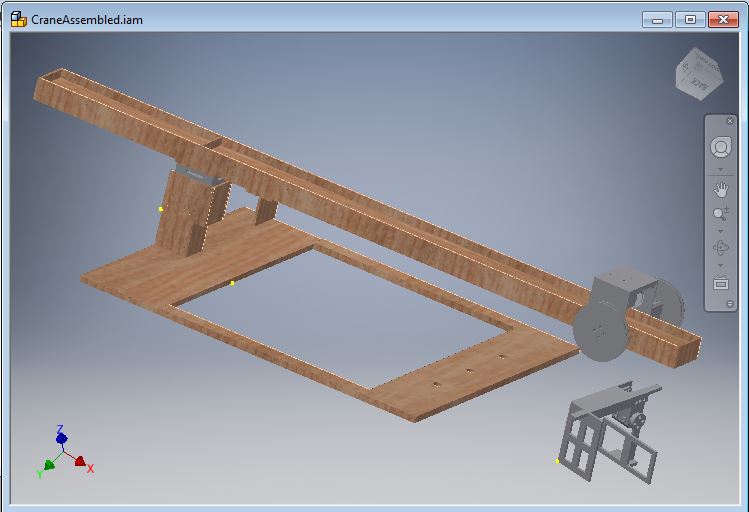
Crane Design:
Mechanical Design:
System Architecture:
Electrical Design:
Software Diagram: