Introduction: We are interested in modeling the movement of a planar Stewart platform in the forward kinematic problem. This is an important problem in the real world, and has applications to simulations for space craft movements, among other things. To solve this problem, we used an equation solver to find the variables theta, x and y needed to model the movement of a triangular platform with varying strut lengths.
1. We create a function file 'f' which we test with given values for theta to verify that our code is correct. This function file also plots f on an interval between -pi and pi. The code for our function file is in the link that follows: function_file.m.
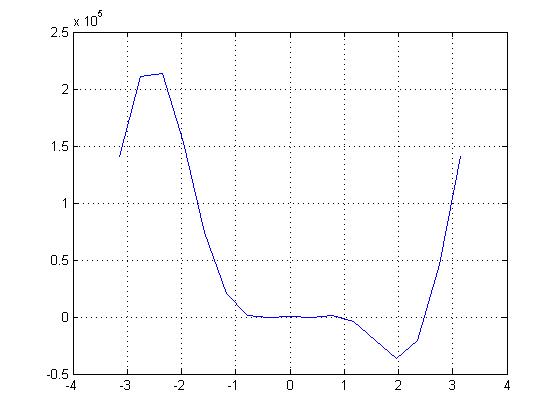
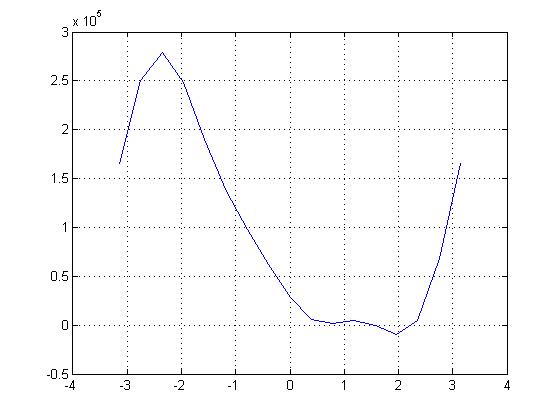
2. Here is the graph of f from part 1:
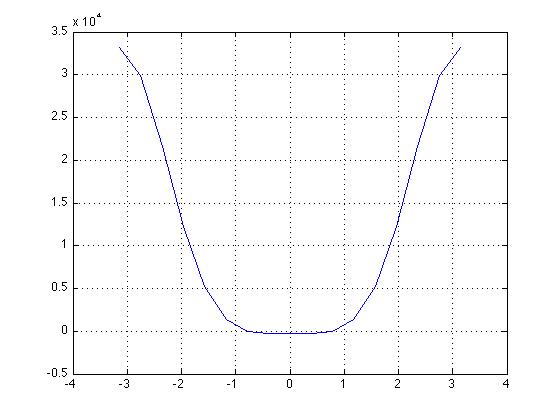 . Here we see the two zeros
at -pi/4 and pi/4.
. Here we see the two zeros
at -pi/4 and pi/4.
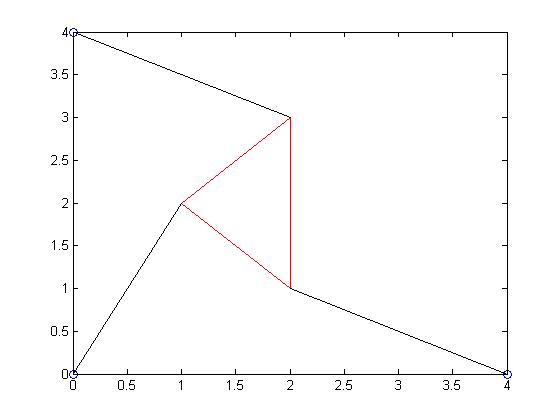
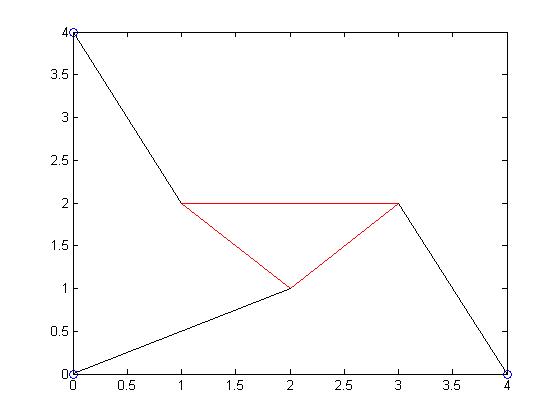
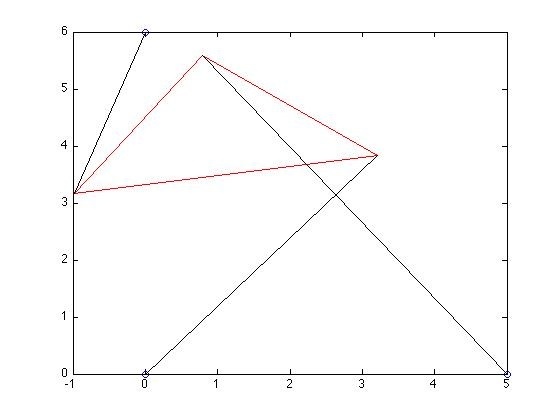
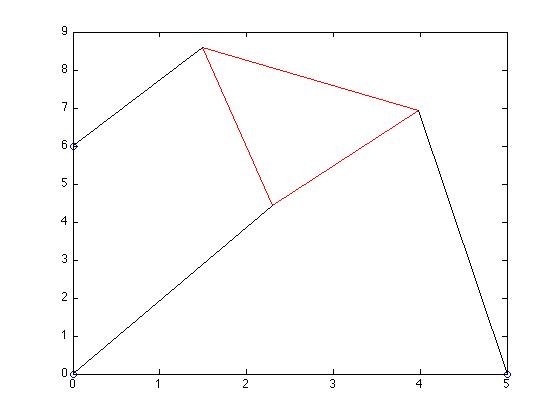
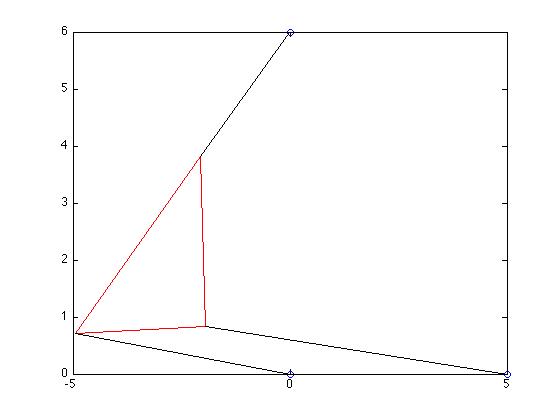
3. We were also able to reproduce graphs of the platform and struts with
the given values using pose_graph.m.
theta = pi/4:
 theta = -pi/4:
theta = -pi/4:
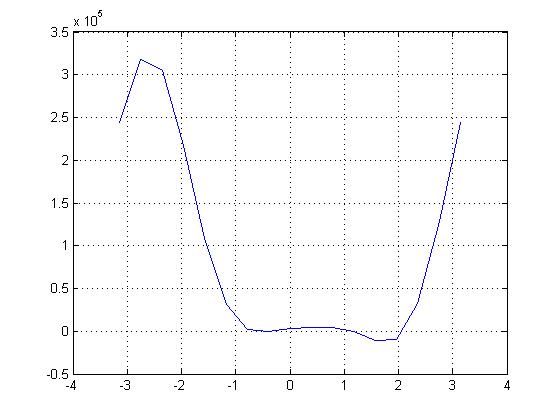
 4. In this part of the project, we used the
secant_method.m with function file f1.m to solve
for theta (secant method code provided by Dr.
Padmanabhan Seshaiyer). Once theta has been calculated, we plug it into proj1_pose.m. The graph of the function f is
shown below, and
from it we find four poses with differing thetas and x's and y's:
Function f:
4. In this part of the project, we used the
secant_method.m with function file f1.m to solve
for theta (secant method code provided by Dr.
Padmanabhan Seshaiyer). Once theta has been calculated, we plug it into proj1_pose.m. The graph of the function f is
shown below, and
from it we find four poses with differing thetas and x's and y's:
Function f:
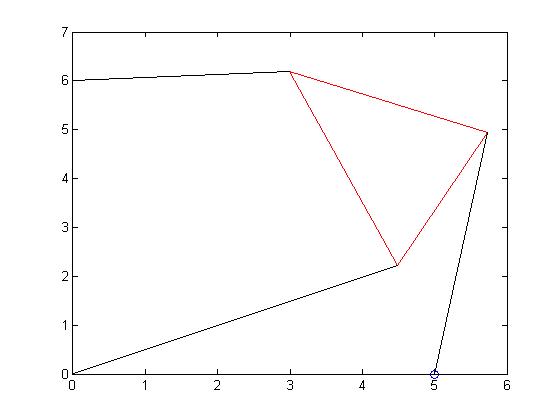
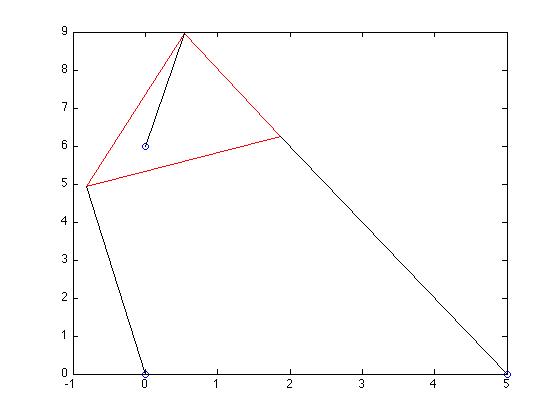
 Below are the 4 poses produced by the thetas:
theta = 1.14368552, x = 4.4818, y = 2.2167:
Below are the 4 poses produced by the thetas:
theta = 1.14368552, x = 4.4818, y = 2.2167:
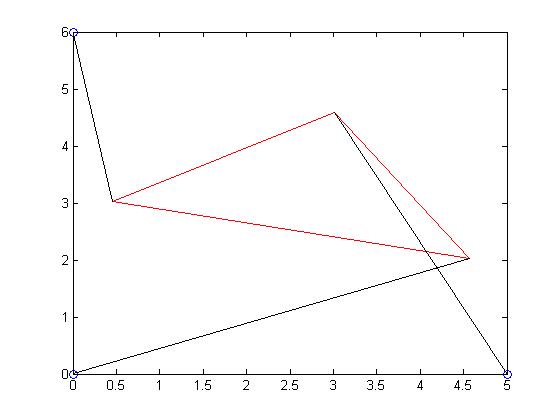
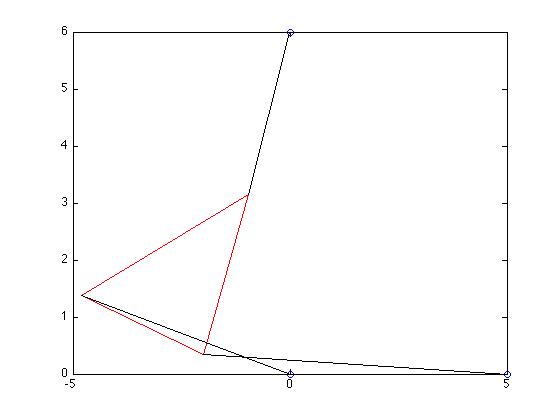
 theta = 2.11590901, x = 4.5718, y = 2.0244:
theta = 2.11590901, x = 4.5718, y = 2.0244:
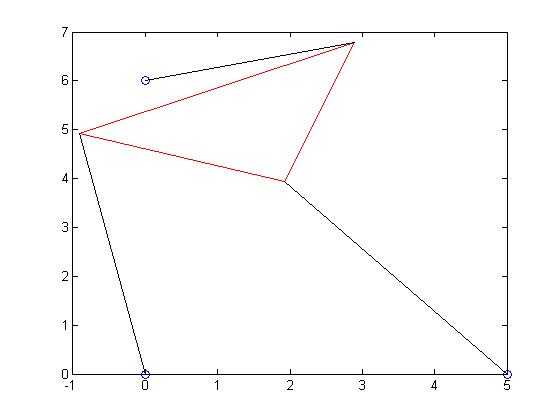
 theta = -0.33100518, x = -0.9147, y = 4.9156:
theta = -0.33100518, x = -0.9147, y = 4.9156:
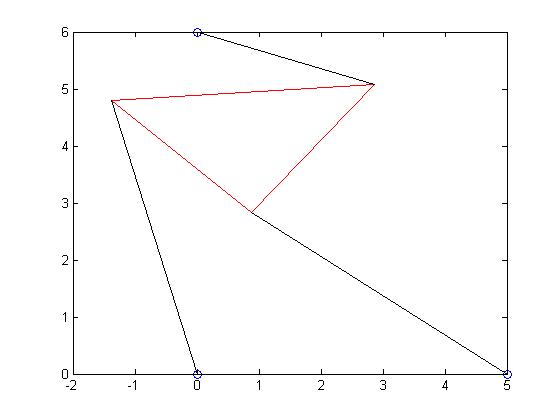
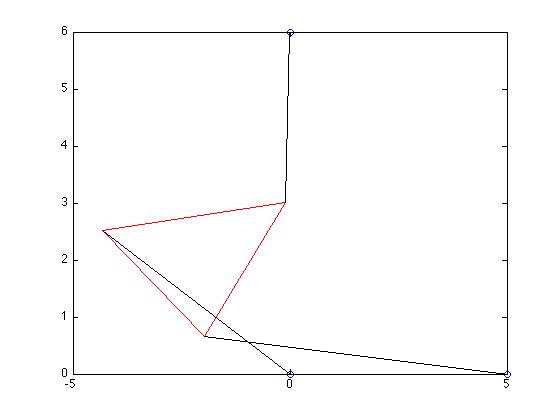
 theta = -0.72084920, x = -1.3784, y = 4.8063:
theta = -0.72084920, x = -1.3784, y = 4.8063:
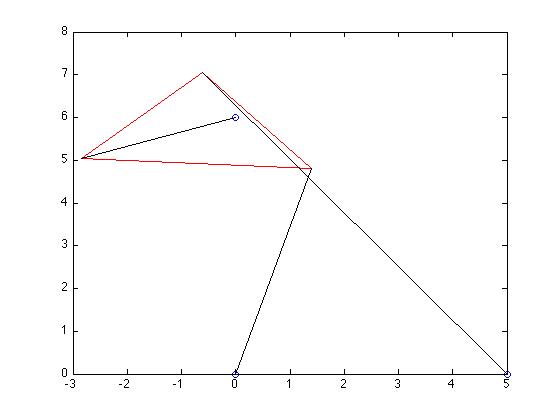
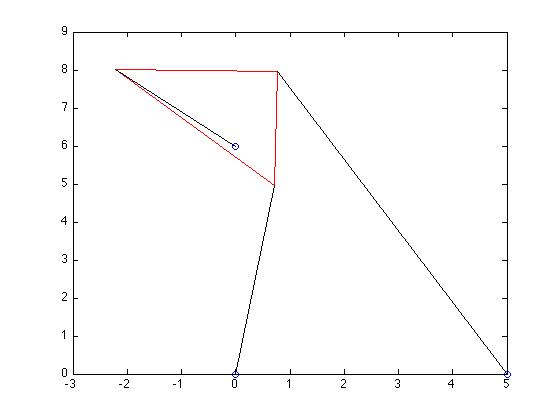
 5. Here, we changed the strut length of p2 to 7.0001 and graphed the 6
poses produced by the thetas of f:
Function f:
5. Here, we changed the strut length of p2 to 7.0001 and graphed the 6
poses produced by the thetas of f:
Function f:
 The graphs of the 6 poses are below:
theta = 2.51386358, x = 3.2156, y = 3.8288:
The graphs of the 6 poses are below:
theta = 2.51386358, x = 3.2156, y = 3.8288:
 theta = 0.97767016, x = 2.3034, y = 4.4378:
theta = 0.97767016, x = 2.3034, y = 4.4378:
 theta = 0.45890649, x = -0.8199, y = 4.9323:
theta = 0.45890649, x = -0.8199, y = 4.9323:
 theta = 0.03798183, x = -4.9490, y = 0.7122:
theta = 0.03798183, x = -4.9490, y = 0.7122:
 theta = -0.35525966, x = -4.8045, y = 1.3846:
theta = -0.35525966, x = -4.8045, y = 1.3846:
 theta = -0.67288953, x = -4.3154, y = 2.5253:
theta = -0.67288953, x = -4.3154, y = 2.5253:
 6. We changed p2 to 9 to produce the following graph
of f with only 2 poses:
Function f:
6. We changed p2 to 9 to produce the following graph
of f with only 2 poses:
Function f:
 The poses are below:
theta = 2.29888445, x = 1.3916, y = 4.8024:
The poses are below:
theta = 2.29888445, x = 1.3916, y = 4.8024:
 theta = 1.54794550, x = 0.7100, y = 4.9493:
theta = 1.54794550, x = 0.7100, y = 4.9493:
 Conclusion: We were able to solve the forward kinematic equation, and
effectively model the position of a planar Stewart Platform
for multiple strut lengths using the secant method to find the thetas.
Division of labor: Franz and Avis wrote the code for part 1 together. Avis
wrote
the MatLab script to generate
the graphs, and Franz wrote the code for parts 4-6 that took the
thetas and found the corresponding x and y and verified the strut
lengths of the graphs.
Conclusion: We were able to solve the forward kinematic equation, and
effectively model the position of a planar Stewart Platform
for multiple strut lengths using the secant method to find the thetas.
Division of labor: Franz and Avis wrote the code for part 1 together. Avis
wrote
the MatLab script to generate
the graphs, and Franz wrote the code for parts 4-6 that took the
thetas and found the corresponding x and y and verified the strut
lengths of the graphs.