Mobile Manipulating Unmanned Aerial Vehicle (MMUAV)
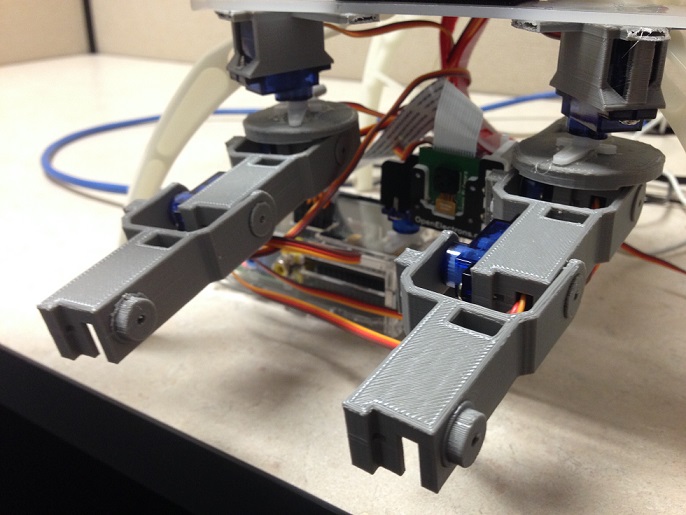
This project adds two arms to our current project about UAVs. The arms were 3D printed using the OpenScad Micro Servo Arm design Our Raspberry Pi can controll the 6 micro servos using the Servo Controller. Richard's ServoBlaster Code enables the Raspberry pi to control the servos. Below you can see how the arms look:
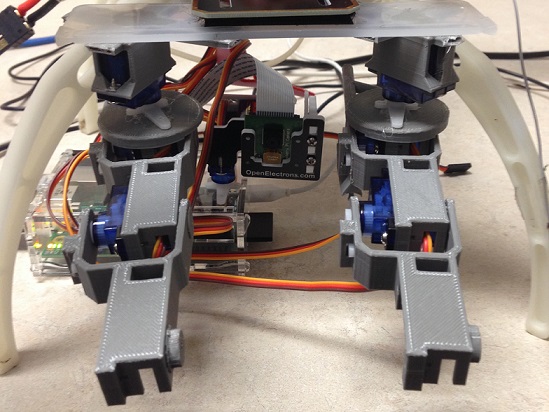
Arms Attached to the Quad
The final position of the Raspberry pi on the Quad at the moment is not determined therefore you can see that it is set on the table. You can see the camera's orientation below.
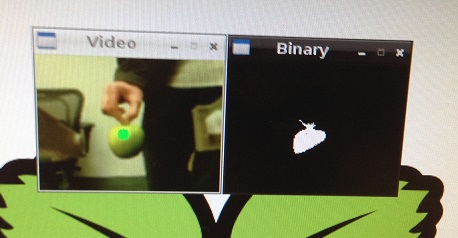
Below you can see how the camera sees a green apple. (160x120 pixels)
Filtering with OpenCV
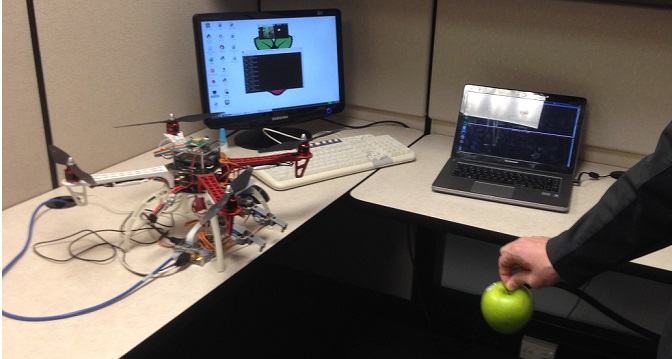
I sshed into our the Raspberry pi and ran the python program which reads from the hubo-ach channel, converts some values, and writes these values to the micro arms. On the raspberry pi I opened the computer vision algorithm which uses the same channel to write new values. Using this setup I can also make a remote channel to publish the channel values to my computer. This would allow me to run simulations using openRave. Below you can see a picture of the setup.
Project Setup
You can see the results in the two videos below. Currently the arms can point towards the apple but later on we can write more algorithms (easily using python) to grasp the object. Notice how the low FPS effect the system.