David Hatch
George Mason University
Robotic Joint
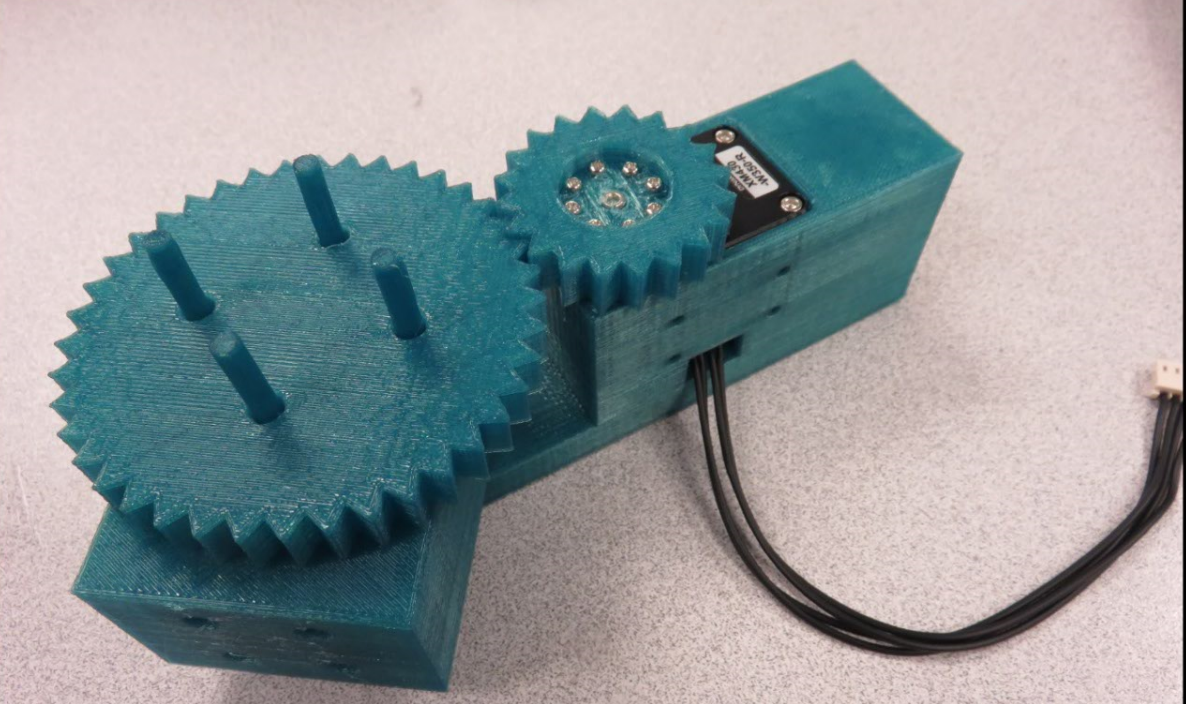
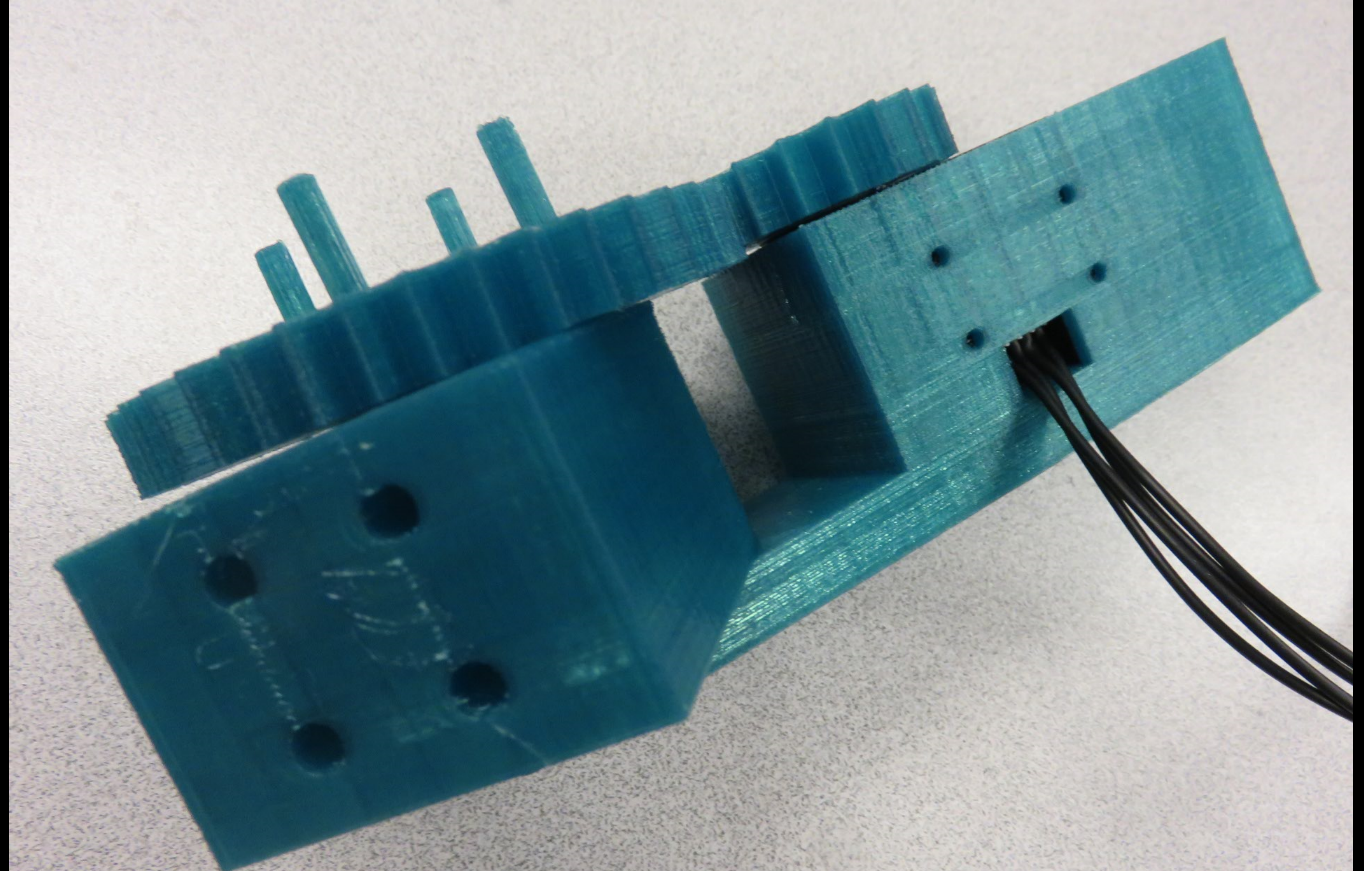
Robotic Joint Prototype: Robotic joint design for Dynamixel XM-430
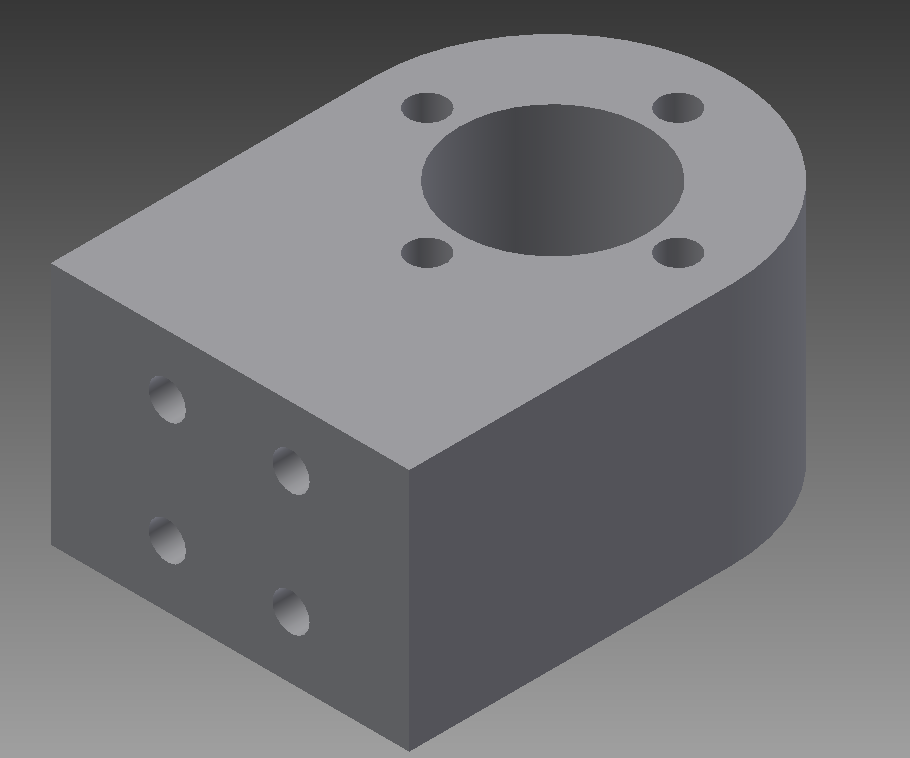
The robotic joint was design with a gear ratio of 2 to 1. The mount holes on the back of the base match with the mount holes on the limb attachment piece allowing for easily connecting multiple joints in series. The parts where design in Autodesk Inventor, dimensions chosen to fit preciesly with the model servo, modifications where made to the 3D printed models to allow for the lack of precision in 3D printing.
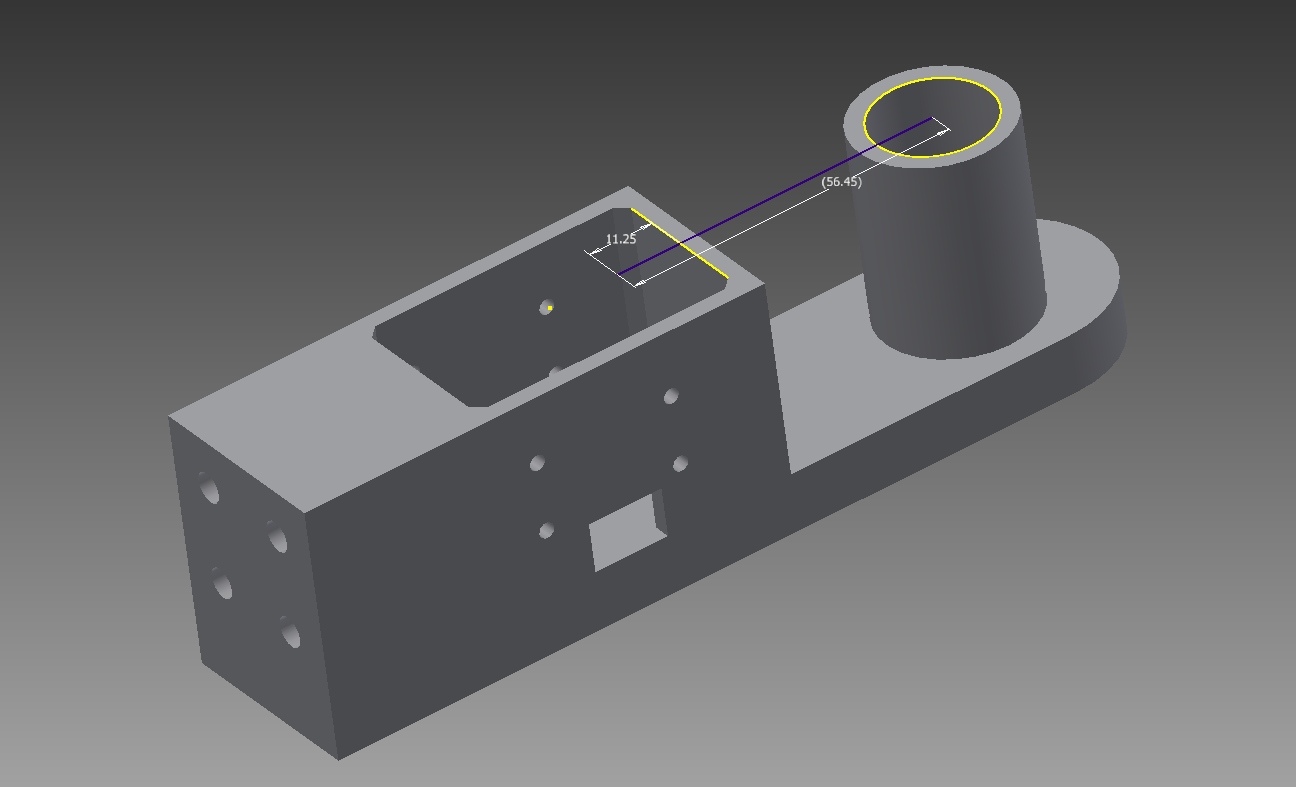
Robotic Joint Base
Robotic Joint Small Gear

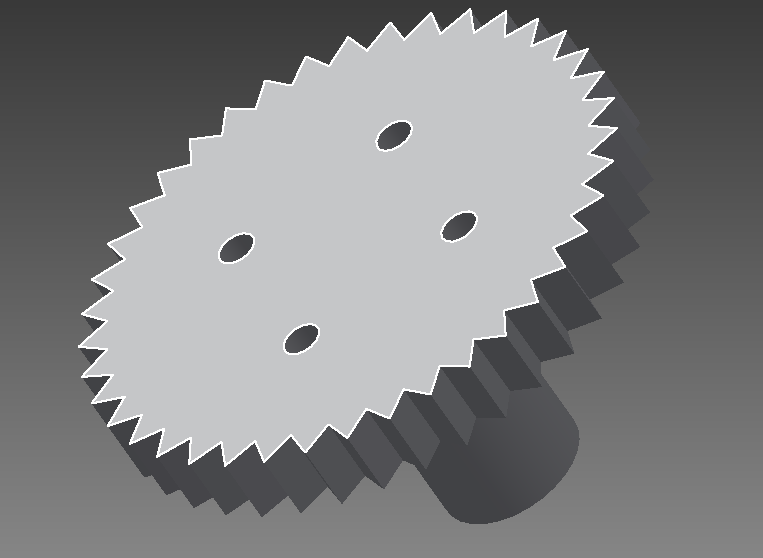
Robotic Joint Large Gear
Robotic Joint Limb Attachment
Video of Robotic Joint Assembly: Visual Servo Video
Prototye images 3D printed from a MakerBot Replicator